Как работает автомобиль
IT News
Дата Категория: it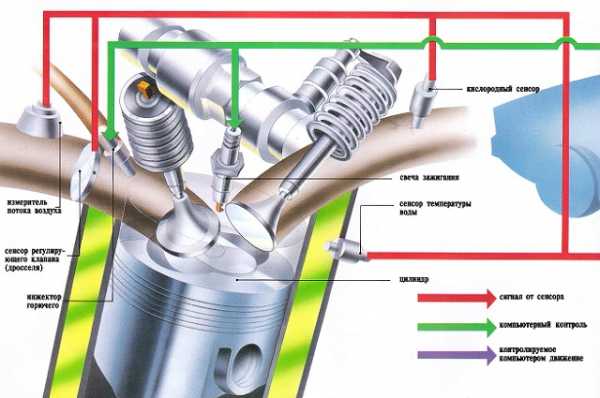
Компьютеры стали обычным явлением в каждом современном автомобиле. Бортовые компьютеры контролируют существенные аспекты функционирования автомобиля, включая торможение и рулевое управление.
Они также отвечают за подвеску, приборы и работу мотора. Водитель и пассажиры не могут управлять установленными в машине компьютерами; их программы хранятся в ПЗУ(постоянных запоминающих устройствах) и не могут быть изменены.
Сначала компьютеры устанавливались в автомобилях, чтобы снизить загрязнение воздуха, после того, как правительство [США] выпустило законы, устанавливающие нормы выбросов выхлопных газов в атмосферу. Сенсоры в выхлопной трубе анализируют выбросы и передают информацию в микропроцессор. Микропроцессор, в свою очередь, регулирует эффективность сжигания топлива для снижения уровня вредных выбросов.
Сенсоры, где бы они ни устанавливались, собирают информацию о состоянии колес, тормозов и подвесной системы, чтобы обеспечить безопасную мягкую езду. Компьютеры могут осуществлять десятки мельчайших исправлений в секунду, постоянно приспосабливаясь к меняющимся условиям. Они предотвращают скольжение колес перед торможением. Компьютер регулирует уровень тормозной жидкости с тем, чтобы колеса продолжали вращаться. Компьютеры помогают смягчить тряску на неровной дороге, направляя давление на амортизаторы. Кроме того, компьютеры позволяют усовершенствовать автомобиль при помощи нововведений, таких как четырехколесное управление и бортовая навигация, которая осведомляет водителя о месте eft) нахождения и предлагает кратчайший путь в пункт назначения.
Контроль двигателя
Чтобы двигатель автомобиля заработал, в цилиндре смешиваются воздух и горючее, а затем смесь под давлением сжигается, выделяя энергию. Компьютер, используя данные о потоке воздуха, горючем, температуре в моторе и выхлопах, определяет наиболее эффективную смесь и количество горючего. Свечи зажигания тоже контролируются компьютером, который обеспечивает правильное таймирование. Компьютер делает постоянные поправки для каждой свечи и цилиндра, обеспечивая тем самым максимальную эффективность работы двигателя.
Контроль скольжения
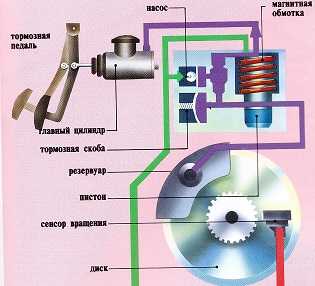
Когда водитель нажимает на тормоз при скользкой дороге, неожиданное давление тормозов может вызвать стопорение одного или двух колес, то есть они перестают вращаться, хотя машина продолжает двигаться. Тяга прекращается, и водитель может потерять контроль управления. Сенсор вращения определяет, когда колеса должны застопориться. Компьютер при помощи насоса давит на тормоза со скоростью 10 раз в секунду, что ослабляет давление и позволяет колесам вращаться, тем самым предотвращая скольжение.
Амортизация ударов
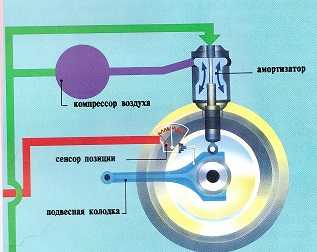
Вес машины поддерживается колесами, пружинами и амортизаторами. Во время движения машину трясет, причем чем неровнее местность, тем сильнее толчки и удары. Сенсоры отмечают движения амортизаторов и регулируют давление с тем, чтобы обеспечить плавную езду. Когда груз в автомобиле не сбалансирован, к примеру, перегружен багажник, компьютер обеспечивает подачу воздуха в то место, куда это необходимо, чтобы поддержать уровень шасси.
Панель управления
Дисплеи компьютерных приборов придают автомобилю сходство с реактивным самолетом. Стрелочные приборы уступили место жидкокристаллическим дисплеям. Эти дисплеи проецируют данные прямо на лобовое стекло, освобождая водителя от необходимости отводить глаза от дороги.

Как работает беспилотный автомобиль?
 Беспилотный автомобиль имеет пять основных компонентов: 1. Компьютерное зрение 2. Совокупность датчиков 3. Позиционирование 4. Планирование пути 5. Управление
Беспилотный автомобиль имеет пять основных компонентов: 1. Компьютерное зрение 2. Совокупность датчиков 3. Позиционирование 4. Планирование пути 5. Управление
Это то, как используются видеокамеры, чтобы увидеть ситуацию на дороге. Людям для этого требуется зрение, а беспилотные автомобили используют камеры для поиска разделительных линий дорожного полотна, отслеживают светофоры и другие транспортные средства.
Это то, как совмещаются данные со всех датчиков. Например, радар и лазерный дальномер вместе с информацией с камер. В плохую погоду для измерения скорости или расстояния используются более надежные датчики, а объединив все эти данные, получается объективная картина дорожной ситуации.
На этом этапе определяем точку, где находится автомобиль. У всех нас есть мобильные телефоны с GPS, поэтому может показаться, что мы всегда знаем где находимся. Но на самом деле GPS работает с точностью всего лишь 1-2 метра. Подумайте только, насколько большие эти 1-2 метра! Если автомобиль сдвинется на это расстояние, то он может оказаться на тротуаре или разбиться. Поэтому существуют более сложные математические формулы, которые помогают автомобилю ориентироваться в пределах 1-2 сантиметров.
Это следующий шаг после того, как мы узнаем окружающую среду и определим местоположение. На этапе планирования намечается траектория движения, чтобы добраться из одной точки в другую. Прогнозируется движение других объектов и транспортных средств вокруг нас. Затем решается какой маневр необходимо предпринять в ответ на действия других транспортных средств. И в конечном счете строится траектория движения, чтобы выполнить такой маневр безопасно и комфортно.
Последний шаг в этом конвейере. Когда у нас есть траектория из нашего блока планирования пути, автомобиль должен повернуть руль и нажать на педаль газа или тормоза, чтобы последовать заданной траектории. Если вы когда нибудь пытались сделать жесткий поворот на скорости, то знаете, каким сложным занятием это может оказаться. Конечно водители на гонках феноменальны, но и компьютеры теперь не плохо с этим справляются!
Еще раз посмотреть в действии работу всех систем вы можете на первом ролике и, надеюсь, вы теперь лучше понимаете технологию работы беспилотных автомобилей.
Хотите научиться делать это сами? Вы можете записаться на программу обучения:
посмотреть
Дэвид Сильвер
Как работает автомобиль - За рулем www.zr.ru - читайте рубрику как работает авто
 За ответ на задачу № 129 «Хромой Ларгус»» (ЗР, № 10, 2018) москвич Юрий Михайлов получает от компании Playme-Russia комбоустройство «3 в 1» Playme Turbo. А теперь — новое непростое задание для знатоков техники.
За ответ на задачу № 129 «Хромой Ларгус»» (ЗР, № 10, 2018) москвич Юрий Михайлов получает от компании Playme-Russia комбоустройство «3 в 1» Playme Turbo. А теперь — новое непростое задание для знатоков техники.
- Консультант
- Как это работает
 Многодневный марафон на выносливость «Дакар», который проходит по большей части по зыбучим пескам, — серьезная встряска не только для пилотов и команд, но и для техники, участвующей в испытании. В этой подборке — только самые удивительные и невероятные факты о многодневке.
Многодневный марафон на выносливость «Дакар», который проходит по большей части по зыбучим пескам, — серьезная встряска не только для пилотов и команд, но и для техники, участвующей в испытании. В этой подборке — только самые удивительные и невероятные факты о многодневке.- Консультант
- Как это работает
 Автор «За рулем» провел неделю с инженерами технического центра Nissan Europe и принял участие в доводке обновленных кроссоверов X-Trail и Qashqai. Представляете, они замораживали амортизаторы!
Автор «За рулем» провел неделю с инженерами технического центра Nissan Europe и принял участие в доводке обновленных кроссоверов X-Trail и Qashqai. Представляете, они замораживали амортизаторы!- Консультант
- Как это работает
 За ответ на задачу № 127 «Кипит наш разум» (ЗР, № 8, 2018) Павел Кораблев, житель Вологды, получает от компании Playme-Russia комбоустройство «3 в 1» Playme Turbo. А теперь — новая задача!
За ответ на задачу № 127 «Кипит наш разум» (ЗР, № 8, 2018) Павел Кораблев, житель Вологды, получает от компании Playme-Russia комбоустройство «3 в 1» Playme Turbo. А теперь — новая задача!- Консультант
- Как это работает
 За ответ на задачу № 126 «Температурная аномалия» (ЗР, № 7, 2018) москвич Сергей Рыбкин получает от компании Playme-Russia комбоустройство «3 в 1» Playme Turbo. А теперь — новое задание.
За ответ на задачу № 126 «Температурная аномалия» (ЗР, № 7, 2018) москвич Сергей Рыбкин получает от компании Playme-Russia комбоустройство «3 в 1» Playme Turbo. А теперь — новое задание.- Консультант
- Как это работает
 Продажа автомобиля по объявлению требует от владельца максимальной концентрации, посколько важно не только найти покупателя, но и грамотно оформить саму сделку. Рассмотрим, какие документы потребуются для продажи авто по объявлению.
Продажа автомобиля по объявлению требует от владельца максимальной концентрации, посколько важно не только найти покупателя, но и грамотно оформить саму сделку. Рассмотрим, какие документы потребуются для продажи авто по объявлению.- Консультант
- Как это работает
 Технические вопросы активно обсуждаются на форуме «За рулем». В дискуссиях участвуют авторы статей, вызвавших наибольший резонанс, как это было с публикацией о чип-тюнинге под рубрикой «Ресурс». Так, сомнения у читателей вызвало утверждение о том, что чипованный мотор может потреблять меньше топлива по сравнению с серийным.
Технические вопросы активно обсуждаются на форуме «За рулем». В дискуссиях участвуют авторы статей, вызвавших наибольший резонанс, как это было с публикацией о чип-тюнинге под рубрикой «Ресурс». Так, сомнения у читателей вызвало утверждение о том, что чипованный мотор может потреблять меньше топлива по сравнению с серийным.- Консультант
- Как это работает
 За ответ на задачу № 125 «Сухая Creta» (ЗР, № 6, 2018) Олег Леонов, житель Смоленска, получает от компании Playme-Russia комбоустройство «3 в 1» Playme Turbo. А теперь — новое задание от эксперта «За рулем». Ответы принимаются до 1 октября 2018 года.
За ответ на задачу № 125 «Сухая Creta» (ЗР, № 6, 2018) Олег Леонов, житель Смоленска, получает от компании Playme-Russia комбоустройство «3 в 1» Playme Turbo. А теперь — новое задание от эксперта «За рулем». Ответы принимаются до 1 октября 2018 года.- Консультант
- Как это работает
 Самые горячие дискуссии на форуме «За рулем» разгораются по техническим вопросам. Большой интерес вызвала статья «Бензиновый или дизельный: чьи лошади сильнее?». Читатели оспаривают утверждение, что коробка передач не способна изменить мощность двигателя. Парирует эксперт ЗР.
Самые горячие дискуссии на форуме «За рулем» разгораются по техническим вопросам. Большой интерес вызвала статья «Бензиновый или дизельный: чьи лошади сильнее?». Читатели оспаривают утверждение, что коробка передач не способна изменить мощность двигателя. Парирует эксперт ЗР.- Консультант
- Как это работает
 Автомобили Subaru любят явно не за дизайн и не за отделку интерьера. Главные козыри марки — оппозитные моторы и полный привод, который японцы непременно называют симметричным. И добавляют: будущее Subaru определяют новые решения — глобальная модульная платформа SGP, вариатор, комплекс систем безопасности EyeSight.
Автомобили Subaru любят явно не за дизайн и не за отделку интерьера. Главные козыри марки — оппозитные моторы и полный привод, который японцы непременно называют симметричным. И добавляют: будущее Subaru определяют новые решения — глобальная модульная платформа SGP, вариатор, комплекс систем безопасности EyeSight.- Консультант
- Как это работает
Страницы
← предыдущаяследующая →
12345678...









"Питер - АТ"
ИНН 780703320484
ОГРНИП 313784720500453
Новости
-
Отзывы о Питер-АТ
Спасибо нашим клиентам за отзывы о нас:
-
Акция на ремонт вариаторных трансмиссий

-
Замена масла в двигателе в подарок
При замене масла в АКПП замена масла в двигателе бесплатно! -
Клиенту на заметку
-
Контрактные АКПП в СПб
