Настройка холостого хода
Настройка Холостого Хода (про турбо-январь) — DRIVE2
Настройка Холостого ХодаРечь пойдет именно про настройку работы двигателя на ХХ, что является весьма актуальным для моторов отличных от стандартных. Метод вполне работоспособный, как выяснилась и на неисправных двигателях, на которых удается добиться вменяемого ХХ даже при серьезных неисправностях в ЦПГ для любых существующих прошивок в которых есть РХХ.
Для начала несколько слов о самом процессе регулирования ХХ в контролере. Существуют ДВА регулятора холостого хода в стандартных и приближенных к ним прошивках. Оба регулятора начинают работать когда обороты опускаются ниже оборотов Первого переходного режима, когда выбрасывается флаг ХХ.
Работа П-РегулятораПервый это П-регулятор, который управляет углом зажигания и предназначен для тонкого регулирования, те регулирования при малых отклонениях оборотов. Если разница оборотов заданных и текущих превышает величину Зона нечувствительности то происходит изменение угла зажигания на ХХ:UOZ = UOZXX + KUOZ * EFREQ, где:
UOZXX — УОЗ на ХХ минус Коррекция УОЗ на ХХ
EFREQ — Текущая ошибка оборотов при регулировании.MINEFR — Зона нечувствительности.
KUOZ — Коэффициент коррекции УОЗ, принимается равным Пропорциональному коэффициенту регулятора УОЗ 1 (высокие RPM), если ошибка положительна (EFREQ > 0) или Пропорциональному коэффициенту регулятора УОЗ 2 (низкие RPM), если ошибка отрицательная (EFREQ < 0).Величина приращения УОЗ: (KUOZ * FREQ) ограничивается величинами UDMIN и UDMAX взятыми из соответствующих таблиц Минимальное и Максимальное смещение УОЗ.Фактический смысл этого регулирования заключается в том, что чем больше мы отдалились от заданных оборотов, тем больше изменится УОЗ в сторону для обеспечения возврата к ним. Причем Коэфф 1 валит обороты сверху, а Коэфф 2 поднимает снизу.Работа ПИ-регулятораДругой регулятор это регулятор по воздуху, который отвечает за работу РХХ. Его механизм регулирования сложнее П-регулятора, тк у РХХ нет четко заданной уставки для ХХ. Те РХХ приходится регулировать от того положения в котором он находится в момент наступления ХХ. Поэтому очень важно чтобы когда этот момент наступает, РХХ находился как можно ближе к тому положению в котором будет осуществляться регулирование. Для этого надо настроить Принудительный ХХ, о чем написано выше.Итак, работа ПИ-регулятора описывается формулой:SSM = SSM + TMFR * (KFR * EFREQ + KFRI * (EFREQ — EFRET)), где:SSM — положение РХХ, шаг.
TMFR — Жесткость регулятора частоты вращения – Коэффициент задающий силу изменения положения РХХ в зависимости от разницы оборотов от заданных.
KFR — Пропорциональный коэффициент РХХ – как и в случае с УОЗ регулированием, определяет отклонение РХХ в зависимости от разницы оборотов. Чем больше разница, тем больше будет смещение РХХ от текущего.KFRI — Интегральный коэффициент РХХ – Временной коэффициент, изменяет шаги РХХ, в зависимости от времени непопадания в заданные обороты. Чем дольше по времени обороты не были равны заданным, тем больше будет отклонение РХХ.EFREQ — Текущая ошибка оборотов при регулированииEFRET — Ошибка оборотов на предыдущем цикле регулированияЕсли разница оборотов заданных и текущих превысила Ограничение оборотов для интегратора, то она принимается равной этой величине.
Физический смыл регулятора сводится к тому, что чем больше отклонились обороты от заданных и чем больше по времени они были отклонены, тем больше будет разница в положении РХХ между текущим и следующим. Те в отличие от П-регулятора УОЗ, регулирование осуществляется ступеньками, РХХ будет приближаться к положению регулирования не мгновенно, а значит возможно перерегулирование и вхождение системы в резонансный расколбас.Выбор оборотов ХХДля начала надо выбрать обороты, на которых будет происходить регулирование ХХ. Лучше не жадничать и выбрать обороты на 50 больше гарантированных, тк в процессе движения, они будут опускаться ниже ХХ и надо чтобы мотор не заглох.
Настройка регуляторовЕсли до сих пор не стало понятно, то скажу, что мы никак не можем повлиять на положение УОЗ или РХХ на ХХ. Поэтому единственное чем мы можем оперировать, это коэффициентами. Причем нам надо это делать так, чтобы во время настройки УОЗ, нам не мешал РХХ и наоборот. Поэтому нам понадобится инженерный блок (ОЛТ – Он Лайн Тюнер), в котором можно зафиксировать положение как и УОЗ, так и РХХ.Настройку будем проводить в три этапа: настраиваем ПИ-регулятор РХХ до вменяемых ХХ, затем П-регулятор УОЗ, и затем точно настраиваем ПИ-регулятора, тк после установки УОЗ он уйдет. В принципе можно сразу начать с УОЗ регулятора, если ХХ все-таки есть и держится, но в запущенных случаях все же лучше начать с РХХ.
Процесс займет какое-то время, поэтому во врем трахтения на ХХ будет включаться вентилятор, и РХХ будет скакать на Смещение РХХ при включении вентилятора поэтому на время работы делаем его 0 шагов. Не забудьте по завершению вернуть обратно!
Этап 1. Предварительная настройка ПИ-регулятора РХХ.Выставляем Ограничение оборотов для интегратора в две трети значения разности между заданными оборотами ХХ и первым Переходным режимом. Например ХХ = 1100, обороты второго режима = 1400, тогда Ограничитель будет как (1400 – 1000) * 2/3 = 200. Это необходимо, чтобы подхватывалось регулирование в момент входа в ХХ и при этом не было бы перерегулирования и резкого провала по оборотам. Значение 2/3 эмпирическое, мной придуманное, может кого-то не устроить. В любом случае, делать Ограничение больше разницы ХХ и ХХ2 нет смысла.Итак, открываем в Окно диагностики в ОЛТ и в Прямом управлении фиксируем УОЗ, например на 15 градусах. Далее лезем в коэфф ПИ-регулятора и ставим Интегральный в 0 для того чтобы не мешалось изменении РХХ, от того что обороты долго висят вне заданных. Те на текущем этапе настраиваем только Пропорциональный коэфф. Попробуйте поставить его в 0, а затем в максимальное положение, просто понаблюдайте, что происходит с оборотами, не удивляйтесь если мотор заглохнет. Задача поймать такой пропорциональный коэфф, чтобы РХХ вставал навстречу изменяющися оборотам. Это хорошо видно на графиках. Обороты как бы должны перестать быть волнообразными, если они будут рваными, но примерно придерживаться заданных, это то что нам нужно для настройки П-регулятора УОЗ!
Этап 2. Настройка П-регулятора УОЗ.После того как мы добились вменяемого ХХ, который не плавает волнами, надо настроить УОЗ-регулирование. Для этого надо понять в каких пределах мы можем с помощью УОЗ влиять на обороты. Фиксируем РХХ, как мы раньше фиксировали УОЗ, на примерно среднем положении в котором он пребывает и начинаем двигать углом, так же через прямое управление. При увеличении угла обороты должны расти, а при уменьшении опускаться. Причем, если при увеличении УОЗ, они растут, то при дальнейшем увеличении они начинают опять падать. Крутим вверх, запоминаем угол, при котором обороты еще растут, но скоро будут падать, например это 27 градуса (при 30, например уже начинается спад). Дальше крутим вниз до порога, при котором работа двигателя еще устойчива и обороты реагируют на уменьшение УОЗ и запоминаем его, например это 5 градусов (при 3, уже начинается неустойчивая работа или УОЗ перестает влиять.Рассчитываем средний угол, который и будет углом зажигания. УОЗХХ = (27 + 5) / 2 = 16.Рассчитываем максимальную величину смещения: UDMAX = — UDMIN = 27 – 16 = 11
Выставляем в прошивке УОЗ на ХХ 16 градусов, Коррекция УОЗ на ХХ поднимаем/опускаем так, чтобы оно было равно 0 при рабочих температурах. Смотрим, какое наполнение мотора на ХХ, и в калибровках Максимального и Минимального смещения УОЗ выше этого наполнения ставим 1 и -1 градус соответственно, а ниже и при нем, 11 и -11 соответственно, тем самым не давая вывалиться углу за адекватные пределы регулирования.
Зона нечувствительности выставляем 10 оборотов, тк УОЗ-регулирование это все-таки точная настройка на малых отклонениях.На этом настройка П-регулятора закончена и опять переходим к ПИ-регулированию с помощью РХХ, не забыв зафиксировать УОЗ на наших вычисленных 16 шагах.Смотрим на обороты, вернее на то как они меняются и на то как УОЗ этому противостоит. Задача, играя Коэфф, сделать так чтобы УОЗ выстреливал на встречу скачку оборотов несколько больше чем это нужно, как бы упреждая раскачку оборотов. Те УОЗ должен резко ломаться, не должен быть плавным и волнообразным. Сначала настраиваем Высокие обороты выставляя в 0 Коэфф2, и меняя Коэфф1 от 0 и вверх. Затем начинаем повышать Коэфф2 от 0 так же вверх, следя за изменением реагирования УОЗ на изменение оборотов. Если взять большие Коэфф, то работа мотора будет резкой, жесткой на слух, произойдет перерегулирование и обороты опять начнут плясать. В идеале получаем скачущий УОЗ навстречу изменениям в оборотах.
Этап 3. Окончательная настройка ПИ-регулятора РХХ.Теперь нам фактически надо повторить первый этап настройки, те добиться неплавающего волной ХХ, меняя П-коэфф регулятора, не трогая И-коэфф, который равен 0. Разница в том, что м теперь делаем это при правильном угле и в будущем нам будет помогать УОЗ регулятор, но для начала нам надо правильно настроить Жесткость РХХ, чтобы она соответствовала условиям работы. Раньше ее настраивать не имело смысла, тк наполнение было бы другим.Смотрим обороты ХХ и наполнение при них, лезем в Жесткость РХХ и делаем так, чтобы при ХХ и наполнении на ХХ, в таблице стоял коэфф 1, а при отклонении от Режимной Точки ХХ, Коэфф увеличивался и чем больше отходил бы, тем больше он был бы. Получится как бы трехмерная чашка, у которой на дне Режимная Точка ХХ с коэфф 1 и по мере отдаления от ней Коэфф растет.
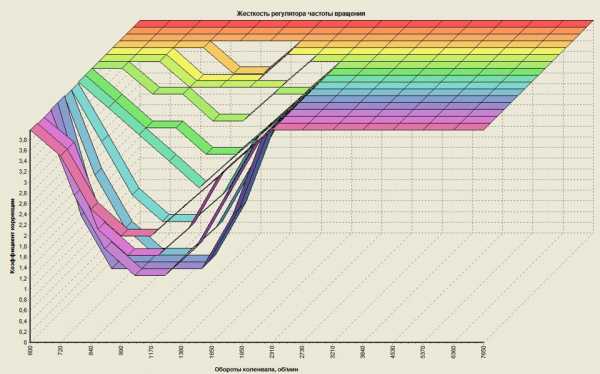
как то так
Тем самым мы обеспечили быстрое изменение числа шагов РХХ при удалении оборотов от заданных. Теперь донастраиваем П-коэфф, к этому времени, обороты уже должны быть достаточно устойчивыми и РХХ будет колебаться несильно, отзываясь на достаточно сильные изменения оборотов.Теперь дошла очередь до И-коэффициента. Увеличиваем его, плавно с 0, по одному шагу, смотрим что происходит с РХХ и оборотами. Увеличиваем до тех пор, пока РХХ и за ним обороты не начнут скачком, неожиданно изменяться то верх то вниз от устойчивого состояния, делаем пару-тройку шагов назад и успокаиваемся. Как показала практика, численные значения И-коэфф колеблется от 1/5 до 1/10 от П-коэфф. В общем когда он маленький, обороты неплохо регулируются, только иногда медленно сбрасываются.
Настройка закончена, возвращаем все в нормальный режим, отключаем Прямое управление, Смещение РХХ при вентиляторе ставим как было (кстати и его можно настроить). Нажимаем на газ, бросаем, смотрим как обороты возвращаются к ХХ, радуемся.
Собственно так настраивается большинство моторов. Причем весьма и весьма успешно.
Автор если не ошибаюсь Andy Frost
Январь 5.1 и C20NE: Настройка холостого хода — бортжурнал Opel Omega C20NE Turbo Январь 5.1 1990 года на DRIVE2
Пока ничего существенного не происходит (лепится матрица для обвеса), расскажу о том как настраивался холостой ход. Запись пригодится тем, кто надумает ставить Январь.Вообще есть немало инфы по этому поводу, но везде чего-то не хватает. Попробую описать некоторые моменты, с которыми пришлось столкнуться.Итак, мы уже имеем уверенный запуск мотора на прошивке j5ls_v43, но холостой ход нестабильный (провалы, плавающие обороты, зависание оборотов после нажатия на педаль газа и прочее).С чего начать? Для начала нужно внести в прошивку правильные параметры датчиков и механизмов, присутствующих на моторе, и откатать БЦН и ПЦН хотя бы в режиме холостого хода. Теперь можно приступить к настройке ХХ.
!Некоторые из настроек могут быть индивидуальными даже при одинаковых моторах, на настройки может влиять тип всей системы впуска и даже выпуска.
Состав смесиНа свой вкус, можно даже 14.7 (или еще беднее) при любой температуре, но на холодную лучше сделать богаче, так как испарения бензина в тех режимах гораздо хуже. Да, мотор будет быстрее прогреваться на более бедной смеси, но мне нужнее так. Еще желательно выставить более богатую смесь до начала зоны перегрева двигателя, на такой смеси мотор греется меньше.
Желаемые обороты ХХПо книжке на этом моторе 720-880 об/мин, но я выбрал 900 в прогретом состоянии, так увереннее передвигаться на ХХ без газа.
Коэффициент 1 переходного режимаКоэффициентом устанавливается граница оборотов, проходя через которую, регуляторы (УОЗ и РХХ) начинают регулировать обороты. Считается просто:[обороты ХХ] + [обороты ХХ] × коэффициент 1 = обороты первого переходного режимаВ нашем случае:900 + 900 × 0,223 = 1100,7 об/минИменно на этой отметке при сбросе газа РХХ начнет регулирование оборотов на холостом ходу.
Почему именно 0,223? Изначально в прошивке стоял очень большой коэффициент (в районе 0,5), что влекло за собой очень медленный спад оборотов, так как регулятору приходилось уменьшать большее их количество. Если, например, выбрать меньший коэффициент (например 0,1), то РХХ не будет успевать становится в нужное положение для поддержания заданных оборотов на ХХ, после чего будет провал по оборотам и двигатель может заглохнуть.
Коэффициент 2 переходного режимаЭтим коэффициентом устанавливается граница оборотов, при выходе из которой регуляторы уже не будут участвовать в уставке оборотов ХХ. Считается так:[обороты первого переходного режима] + [обороты ХХ] × коэффициент 2 = обороты второго переходного режима.В нашем случае:1100,7 + 900 × 0,332 = 1399,5 об/мин
Это значит что при увеличении оборотов, например, до 1250 об/мин, при сбросе газа регуляторы сразу начнут работать и приводить обороты мотора в режим ХХ, а при увеличении свыше 1399,5 об/мин — регулировка начнется только когда обороты опустятся ниже 1100,7 об/мин.
УОЗ на ХХОчень интересная настройка, от которой ощутимо даже на слух как меняется работа мотора. Чисто экспериментальным путем пришел к таким значениям. Пробовал углы от 5 до 20 градусов на ХХ. При высоких значениях мотор работает жестче и в какой-то мере шумнее, при низких — тише. Но именно при около 10 градусах мотор C20NE на мой взгляд работает нормально. Тянет при 10 так же как и при 15, но работает мягче.
Коррекция УОЗ на ХХИспользуется для коррекции угла на ХХ в зависимости от температуры ОЖ. В не прогретом состоянии угол нужно увеличивать, чтобы компенсировать медленную скорость горения при низких температурах. До идеала еще не вылизал, но работает нормально.
Желаемое положение РХХСильно зависит от самого РХХ, его адаптера (у меня hand made), перетечек воздуха через закрытый дроссель, герметичности впуска и потребления воздуха двигателем. Примерные значения выбрать не сложно. В любой диагностической программе нужно посмотреть количество шагов регулятора по мере прогрева мотора и добавить к этим значениям от 5 до 20 шагов. У меня значения небольшие из-за большого регулятора и сечения адаптера — 20-22 шага в прогретом состоянии. Так как каждый шаг регулятора дает существенную добавку воздуха, решил добавить лишь несколько шагов, установив желаемое положение в 25 шагов. Именно с этого положения регулятор будет постепенно изменять шаги до тех пор (20-22 шага), пока обороты не станут заданными (900 об/мин). При увеличении желаемого положения до 30 шагов, обороты падали более медленно.
Смещение РХХ при открытом дросселеОщущается при открытии дросселя на небольшой %. Часто в прошивках встречал 5 шагов, себе поставил 0, можно увести и в отрицательное значение (прикрытие РХХ при открытом дросселе). Смысл двигать значение есть при дерганиях машины при сбросе газа.
Интегральный и пропорциональный коэффициентыПереписывать чужие слова не буду, скажу только что чем больше К, тем на большее количество шагов будет перемещаться шток регулятора, но есть предел, переступив через который обороты мотора могут иметь синусоидальные колебания (постоянное повышение и понижение, как будто кто-то постоянно нажимает и отпускает педаль газа), но главное как оказалось не это. Не сразу я понял, да и трудно было в это поверить, но в прошивке j5ls_v43 они перепутаны местами! Да-да! Устанавливая И коэффициент, на самом деле мы устанавливаем П коэффициент и наоборот!Итак, путем проб и ошибок имеем следующие значения:И коэффициент (на самом деле П): 0,00417 (кг/ч)/(об/мин)
П коэффициент (на самом деле И): 0,00300 (кг/ч)/мин-1/сек
Жесткость регулятора частоты вращенияИмея данные о наполнении мотора воздухом (БЦН) на ХХ, вносим в эту таблицу их так, чтобы при нашем наполнении (136 мг/цикл) при оборотах ХХ коэффициент составлял 1, а при отклонении оборотов К увеличивался, от которого зависит скорость перемещения штока регулятора.
Минимальное и максимальное смещение УОЗЗдесь устанавливаются границы для УОЗ-регулятора, который изменением угла опускает или поднимает обороты.
Это был не полный список настроек, но их оказалось достаточно. Конечно без опыта понадобилось несколько дней чтобы понять какой параметр на что влияет и довести до нормального состояния холостой ход. За то много чего интересного узнал :)
Настройка холостого хода и зажигания — бортжурнал Mitsubishi Lancer Особый пациент 1999 года на DRIVE2
Mitsubishi Lancer/Colt 1996-2001 г.в Настройка холостого хода и зажиганияНа примере двигателя 4G13 12V инжектор трамблерный
Первым делом проверяем компрессию в цилиндрах, которая должна быть не менее 9-10 бар, причем разница в комрессии не должна быть больше 1 бара. Иначе возможен неустойчивый холостой ход и нейстойчивая работа двигателя в целом.Т.к ход поршня на двигателе большой 82мм, идеальная куомпрессия должна быть 13-14бар.
Незабывайте что нормальная компрессия может быть и на изношенным двигателе который пожирает масло, т.к. масло попадает в камеру сгорания тем самым значительно повышая компрессию.
Далее совмещаем метки ГРМ, т.е устанавливаем поршень 1 цилиндра в ВМТ. Все фото актуальны для двигателя 4G13 12V инжектор трамблерный.


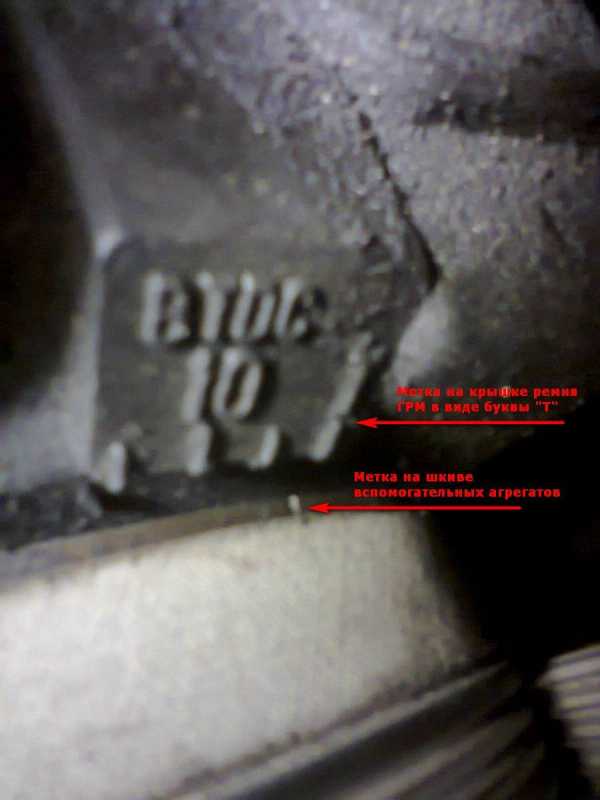
Если шкивы ГРМ стоят по меткам, то переходим к установке зажигания. В противном случае устанавливаем ремень ГРМ по меткам.Важно: для правильной настройки зажигания шкивы должны стоять по меткам.Снимаем трамблер, совмещаем штифт привода трамблера с меткой на корпусе трамблера и в таком положении устанавливаем трамблер.
Важно: установить трамблер именно в таком положении штифта совмещенного с меткой, совсем чуток прокручивая трамблер если штифт не входит в выемку на распредилительном валу. Идельный вариант вообще не прокручивать, в первого раза попытаться попасть штифтом в выемку на распредвалу.

Порядок подключение высоковольтных проводов пронумерован и указан на крышке трамблера.

Переходим к настройке датчика положения дроссельной заслонки, далее ДПДЗ.Нас интересует сам датчик, винт положения заслонки, винт настройки холостого хода(SAS)


Ослябляем 2 винтика натяга троса заслонки, извлекаем трос из рычага заслонкиНастраиваем винт положения заслонки, т.е винт надо закрутить либо открутить ровно на столько что бы рычаг дроссельной заслонки перестал закусывать, не более. Под словом закусывать имеется ввиду что не будет чувствоваться трения при открывании заслонки рукой. В общем когда вы выкрутите винт полностью заслонка будет закусывать и вы это почувствуете при открытии ее рукой, закрутить его надо именно до момента когда не будет закусывания. После настройки винта нужно закрутить гайку на нем для фиксации.
Настраиваем ДПДЗ, это тонкая настройка заключается в том чтобы при закрытой заслонке электронный блок автомобиля-далее мозги видел что заслонка закрыта и переходим в режим холостого хода. По книге нужно вставить шуп между винтом положения заслонки и упором рычага заслонки упирающийся на этот винт, лично я этого не делал.
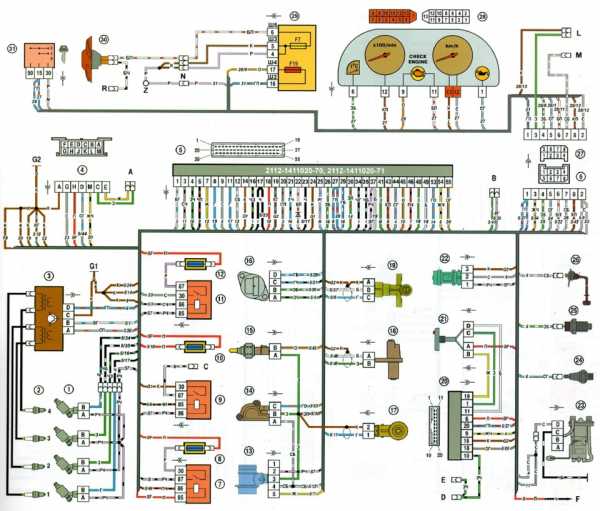
Сначало проверяем правильно ли настроен ДПДЗВинт положения заслонки настроен, дроссельная заслонка полность закрыта, зажигание выключено, снимаем фишку ДПДЗ. Распиновка контактов ДПДЗ.
Слева направо: 1-питание 5V с мозгов, 2-сигнал на мозги, 3-сигнал на регулятор холостого хода, 4-масса.

ДПДЗ Lancer VI
Понадобится тестер.Переводим тестер в режим пищалки, т.е есть замыкание пищит, нет замыкания не пищит. И проверяем контакты 3 и 4 датчика, когда заслонка полность закрыта между ними должно быть замыкание т.е тестер пищит. Чуть чуть приоткрываем заслонку и вплоть до полного открытия пищания не должно быть т.е. контакты разомкнуты. Смысл этого как уже писал выше когда заслонка полность закрыта контакты 3 и 4 ДПДЗ замыкаются между собой и мозги видят что наступил холостой ход. Когда заслонка хотя бы чуток приоткрывается контакты размыкаются и мозги видят что холостой закончился и переходим на мощностной режим.
Если указанные контакты не замкнуты при полность закрытой заслонке, значит ослабляем 2 болтика фиксации ДПДЗ. Проворачиваем ДПДЗ до упора против часовой стрелки, потом медленно поворачиваем ДПДЗ по часовой стрелке при подключенном тестере на 3 и 4 контакты, ищем замыкание между ними. Как только нашли замыкание, фиксируем болтами ДПДЗ в таком положении.Важно четко поймать момент замыкания/размыкания, это доли мм. Т.е нет замыкания провернули ДПЗД на децл, поймали замыкание и фиксируем.
Проверяем правильно ли ДПДЗ показывает сигнал на мозги. Для этой операции я напаял на щупы тестера иголки, чтобы не оголяя провода можно было получить контакт. Одеваем фишку датчика на сам ДПДЗ. Включаем зажигание, но не заводим двигатель. Переводим тестер в режим замера напряжения. На одетой на датчик фишке протыкаем щупами тестера контакты 2 и 4 и мерим между ними напряжение. При полность закрытой заслонке между указанными контактами фишки напряжение должно быть 0.4-0.8В, медленно открываем заслонку напряжение должно соответственно медленно увеличиваться без скачков и при полностью открытой заслонке напряжение долно быть максимальным, у меня было 4.7В.
Метки ГРМ в порядке, зажигание настроено, ДПДЗ настроен.Теперь собираем все обратно, ставим гофру, затягиваем хомуты, ставим обратно тросик газа который не должен быть натянут, чтобы заслонка всегда полность закрывалась. Настраиваем холостой ход. Нужен цифровой тахометр, тахометр на панели приборовне подойдет т.к. точности от него не добъешься. Я использовал самый простой предназначенный для вазовской классики. Тахометр имеет 3 провода. Два из них это питание плюс и минус. Третий он как правило белый подключается к проводу на трамблере.
На фишке трамблера используем второй провод сверху белого цвета, именно он дает сигнал об оборотах двигателя.


Тахомерт подключен. Теперь замыкаем на массу кузова специальный провод, он изолирован коричневой заглушкой и изолентой. На леворуких машинах он находится у стенки моторного отсека в районе ДПДЗ. Можно использовать провод на концах которого напаяны крокодильчики для замыкания на массу.

Заводим двигатель, прогреваем его до срабатывания вентилятора. Предварительно можно полность закрутить и открутить на 2.5 оборота винт настройки холостого хода(SAS). Включаем ближний свет и печку на полную. По показаниям тахометра играемся винтом настройки холостого хода(SAS) и добиваемся стабильных 830-860об.мин.
Покрутили винт настройки холостого хода(SAS), погазовали пару раз подождали 1-2 минуты и только потом смотрим на тахометр. Дело в том что когда вы покрутили винт настройки холостого хода(SAS) и настроили нужные обороты, после прогазовки они могут измениться, т.к. регулятор холостого хода будет адаптироваться уже к новым условиям прохождения воздуха в обход заслонки.
Базовая настройка холостого хода на GF
К величайшему сожалению, ни где, даже в сервис-мануале не описана процедура регулировки холостого хода на автомобилях Mazda 626 (Capella) с двигателями FS и FP. Отчасти оно и понятно — обороты холостого хода полностью контролируются блоком управления двигателем, и, как предполагали инженеры, если обороты холостого хода не соответствуют норме (650 ± 100 об\мин для автомобилей 97-99 года выпуска, и 650 ± 50 об.мин для автомобилей начиная с 99 года выпуска), то значит, в системе управления двигателем есть неисправность которую надо устранить и снова наступит счастье. Однако, счастье наступает не всегда. Дело в том, что блок управления двигателя настроен так, что всегда стремится выставить 650 об.мин. любой ценой. И обычно, эта цена — «убежавший» угол опережения зажигания. Считается, что УОЗ не регулируется, однако он жестко зависит от оборотов двигателя, следовательно, правильно выставив обороты холостого хода, мы получим правильный УОЗ, и наоборот. Следовательно, философия регулировки холостого хода и заключается в том, чтобы «поймать» правильный УОЗ на холостом ходу. Перед описанием собственно регулировки, следует ответить на вопрос, зачем нам надо регулировать обороты холостого хода. Часто возникает ситуация, когда двигатель исправен, а обороты холостого хода нуждается в регулировке (например после промывки дроссельной заслонки со снятием и полным ее разбором). Именно для таких случаев, на основе справочных данных, опыта и рекомендаций сервис-мануала был выявлен следующий алгоритм регулировки холостого хода. Нам потребуются — скрепка или кусок тонкого провода, стробоскоп (желательно работающий только по емкостному датчику, без синхронизации с катушкой), цифровой тахометр и плоская отвертка.
В отсутствие цифрового тахометра, можно примерно ориентироваться на показания бортового тахометра. На приведенном фото указано какие риски каким оборотам соответствуют:
Сами метки зажигания нанесены на площадке рядом со шкивом коленвала левее и ниже правой опоры двигателя:
На шкиве коленвала есть желтая метка. С какой насечкой метка совпала — такой угол у нас и выставлен. Если метки нет, то надо протереть шкив от грязи:)
Итак, полностью прогреваем двигатель, выключаем все потребители электроэнергии, руль ставим прямо, глушим двигатель.
- Замыкаем в диагностическом разъеме контакты GND и TEN
- К контакту IG подключаем цифровой тахометр
- К высоковольтному проводу первого цилиндра подключаем стробоскоп
- Заводим двигатель, и если включается вентилятор системы охлаждения, ждем пока он остановится
- Смотрим на показания тахометра, должно быть 550 об.мин. Если больше — регулировочным винтом снижаем до 550 об.мин. У многих возникнет вопрос, а почему не 650 об.мин? Отвечаю, практика показала, что если выставить 650 об.мин., то после продолжительной активной езды (скажем по трассе) обороты холостого хода вырастают до 750 и УОЗ сбивается. Чем это вызвано не знаю, но факт.
- Глушим двигатель, снимаем перемычку из диагностического разъема, заводим двигатель
- Несколько раз газуем до 2500-3000 об.мин.
- При отпускании педали обороты должны снизится до 650 (возможен небольшой провал ниже, но должны подняться до 650 об.мин.)
- Проверяем УОЗ, должно быть 6-18 градусов.
Собственно все. Обороты должны оставаться неизменными (650 об.мин.) вне зависимости от включения каких-либо нагрузок. Однако, в сервис мануале оговаривается, что допускается кратковременный провал оборотов при включении нагрузки, но потом они обязательно должны придти в норму.







"Питер - АТ"
ИНН 780703320484
ОГРНИП 313784720500453
Новости
-
Отзывы о Питер-АТ
Спасибо нашим клиентам за отзывы о нас:
-
Акция на ремонт вариаторных трансмиссий

-
Замена масла в двигателе в подарок
При замене масла в АКПП замена масла в двигателе бесплатно! -
Клиенту на заметку
-
Контрактные АКПП в СПб
