Робот и работа
Роботы наступают и когда-нибудь оставят нас всех без работы
Недавно в Японии открылся отель Henn-na (Henn-na Hotel), в котором 90% работ выполняют роботы и 10 человек справляются с оставшимися 10% всех дел. Роботов, выпущенных компанией Kokoro, называют актроидами. Они умеют приветствовать и заселять гостей, устанавливая с ними зрительный контакт и реагируя на движения. Некоторые могут общаться на иностранных языках.

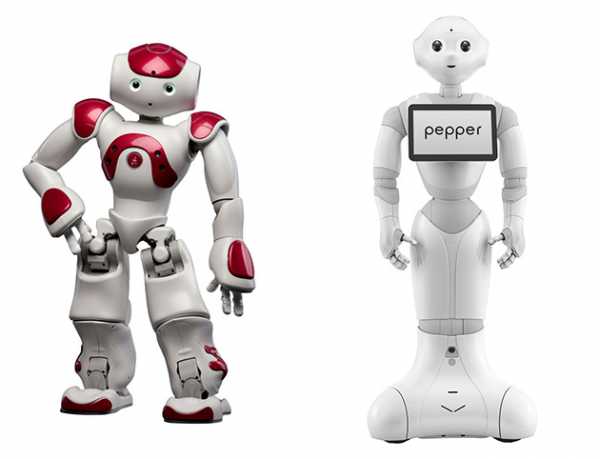
Отель Henn-na, что дословно переводится с японского на английский как «странный отель», использует и других роботов, кроме актроидов, например человекоподобных роботов Нао (NAO) и Пеппер (Pepper) от компании Aldebaran Robotics. Роботы встречают гостей у входа и на стойке регистрации, помогают им снять пальто и относят сумки, убираются в комнатах.
Отель Henn-na не единственный в своём роде. В Нью-Йорке существует YOTEL, в котором роботы заботятся о вещах гостей, делают кофе, приносят бельё, убирают номера и выполняют ещё много другой работы.
А в прошлом году гостиничный гигант Starwood представил роботов, которых назвал Botlrs. Обслуживая гостей, эти роботы могут передвигаться по отелю и в лифтах без человеческой помощи. С 1992 года роботы помогают в больницах: разносят подносы с едой и лекарствами, стирают постельное бельё, выкидывают мусор. В сети гипермаркетов Lowe’s робот OSHbot помогает покупателям отыскать нужный товар.

Amazon использует более 15 000 роботов на своих складах, чтобы вовремя доставлять заказы. Даже армия США планирует заменить десятки тысяч солдат роботами. В прошлом году в Бирмингемском университете появился первый робот-охранник Боб высотой 1,8 метра, который сканирует комнаты и сигнализирует, если видит что-то необычное. Если Боб где-то застревает, он может позвать на помощь, а если разряжается — самоcтоятельно отправляется на подзарядку.

Роботы способствуют повышению продуктивности удалённых работников. В бизнес-школе Массачусетского технологического института те сотрудники, которые работают из дома, могут «разгуливать» по офису и общаться с коллегами при помощи роботов.

Как повсеместное внедрение роботов повлияет на нас
Роботы всё чаще появляются рядом с нами на работе, так не отнимут ли они совсем рабочие места? Некоторые считают, что из-за повсеместного внедрения роботов люди могут оказаться на улице. В 2013 году в Оксфорде провели исследование, согласно которому 47% существующих ныне работ повышенного риска будут вскоре автоматизированы. В течение 20 лет люди на этих местах будут заменены роботами.
Однако существует и другое мнение: отдав машинам тяжёлую работу, люди смогут посвятить себя более интересным и высокотехнологичным занятиям. Так считает и Дэвид Канн, глава Double Robotics, компании, которая создала роботов, используемых в Массачусетском технологическом институте.
Роберт Аткинсон, экономист аналитического центра Фонда технологического развития и инноваций, утверждает: выводы о том, что роботы отнимут рабочие места, основаны на крайне поверхностном анализе ситуации. По сути же происходит обратное: внедрение роботов снижается. Аткинсон объясняет это падение двумя причинами:
- Тридцать лет назад США гораздо активнее инвестировали в развитие роботостроения и программного обеспечения, нежели сейчас.
- Низко висящие фрукты вроде автоматов регистрации в аэропорту уже сорваны.
Третьей причиной, по мнению Аткинса, можно назвать то, что в США не существует политики развития продуктивности.
Они могли сделать многое, чтобы повысить уровень производительности в стране, но ничего даже не планируют. В отличие, например, от Австралии, где есть Национальная комиссия по повышению производительности, работа которой заключается в выявлении возможностей роста. А мы только предполагаем, что должно произойти…
А компаниям выгоднее нанимать людей с низкой заработной платой, нежели автоматизироваться. Стимула для замены сотрудников роботами нет никакого. Вот если бы людям нужно было платить больше, тогда компании задумались бы о роботизации.
Допустим, если большинство представителей низкооплачиваемых профессий потребуют повышения зарплаты, как это сделали в Нью-Йорке работники заведений фастфуда, тогда процесс автоматизации ускорится.
Вот что говорит по этому вопросу Гарри Матиасон, президент юридической компании Littler Mendelson, которая специализируется на вопросах трудового права в связи с роботизацией.
Прогресс есть. В Нью-Йорке работники фастфуда уже добились того, что минимальная зарплата теперь будет $15 в час. Вскоре работодателям будет экономически выгодно перекладывать часть работы на роботов. Соответственно, это ускорит процесс повсеместной автоматизации. Таким образом, увидеть роботов повсюду в ближайшие пять лет мы сможем, если будем сами проявлять экономическую активность.
Гарри Матиасон
Роботы могут отнять нашу работу, но это не плохо
Как и Аткинсон, Матиасон считает, что причин для беспокойства нет. Он объясняет, что автоматизация 47% рабочих мест повышенного риска не имеет ничего общего с безработицей.
Начнётся перемещение людей на те должности, которых нет сейчас, но они появятся в будущем. Если мы обратимся к истории, то увидим, что подобная ситуация уже была. Тогда всё происходило не так стремительно, как сейчас, но тем не менее прецеденты имелись. К слову, в 1870 году сельским хозяйством зарабатывало 70–80% населения, а сейчас всего 1%.
И, кстати, снова обращаясь к истории, можно увидеть, что при появлении новых технологий на производстве безработица всегда оставалась на прежнем уровне или даже уменьшалась. Мне очень хочется посмотреть, что произойдёт в течение ближайших 10 лет: для людей на первом месте будет стоять не угроза безработицы, а возможность научиться чему-то новому. И если человек 10 лет выполнял одну низкоквалифицированную работу, так, возможно, необходимость карьерного роста будет ему только в радость.
Гарри Матиасон
Матиасон обещает, что нас ждут увлекательные времена. Придётся вносить поправки в Трудовой кодекс, отвечая на вопросы, связанные с взаимодействием людей и роботов. Например, как регулировать распространение личной информации, ведь роботы будут записывать то, что слышат.
Несмотря на то что неизвестно, насколько быстро проникнет роботизация во все сферы, нет никаких сомнений в том, что это случится. И пока одни продолжают бояться потерять рабочее место, другие мечтают о том, как это улучшит экономику в целом и благосостояние каждого человека. Производительность компаний будет расти, они будут больше зарабатывать и смогут больше платить работникам.
Однако один из споров до сих пор не разрешён: каково это, когда на ресепшене отеля тебя встречает актроид, который жутко похоже имитирует человеческие жесты…
Как устроены роботы?
Мы часто пишем о роботах. Их делают во всем мире. Иногда они совершенно не похожи на людей, иногда наоборот. Тем не менее многие из нас не имеют ни малейшего представления о том, как их делают, из чего, с какими проблемами сталкиваются инженеры и как их преодолеть. В этой статье мы подробно разберем, как устроены роботы и как они работают.
На самом базовом уровне люди состоят из пяти основных компонентов:
- структура тела;
- система мышц, которая движет телом;
- система органов чувств, которая получает информацию о теле и окружающей среде;
- источник энергии, питающий мышцы и органы чувств;
- мозговая система, которая обрабатывает информацию от органов чувств и дающая указания мышцам.
Конечно, у нас есть ряд нематериальных атрибутов вроде интеллекта и морали, но на чисто физическом уровне список выше включает это.
Роботы делаются из аналогичных компонентов. Обычный робот обладает подвижной физической структурой, электродвигателем определенного рода, системой сенсоров (датчиков, органов чувств), блоком питания и компьютерным «мозгом», который контролирует все эти элементы. По существу, роботы — это техногенные версии животной жизни. Это машины, которые копируют поведение людей и животных.
Джозеф Энгельбергер, пионер промышленной робототехники, однажды заметил: «Я не могу дать определение роботу, но я точно узнаю его, когда увижу». Если вы задумаетесь обо всех возможных машинах, которые люди называют роботами, вы поймете, что невозможно придумать всеобъемлющее определение. У каждого есть свое представление о том, что представляют собой роботы.

Вам наверняка известны эти роботы:
- R2D2 и C-3PO: умные говорящие роботы с ярко выраженной индивидуальностью из фильмов серии «Звездные войны»
- AIBO от Sony: собака-робот, которая обучается в процессе взаимодействия с людьми
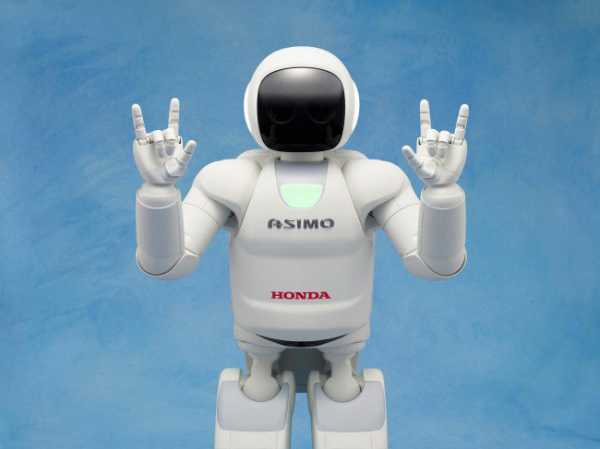
- ASIMO от Honda: робот, который может ходить на двух ногах
- Промышленные роботы: автоматизированные машины, работающие на сборочных конвейерах
- Дейта: почти человекоподобный андроид из «Звездного пути»
- Роботы-саперы
- Марсоходы NASA
- HAL: бортовой компьютер из «Космической Одиссеи 2001 года» Стэнли Кубрика
- MindStorm: популярный роботизированный комплект от LEGO
Все вышеперечисленное можно назвать роботами. Роботом, как правило, называется то, что люди считают роботом. Большинство робототехников (людей, которые делают роботов) использует более точное определение. Они указывают, что роботы обладают перепрограммируемым мозгом (компьютером), который движет тело.
Согласно этому определению, роботы отличаются от других подвижных машин вроде автомобилей, поскольку у них есть компьютерный элемент. У большинства новых автомобилей есть бортовой компьютер, но в него можно внести не так много нового. Вы управляете большинством элементов в автомобиле непосредственно при помощи механических устройств разного рода. Роботы отличаются от обычных компьютеров по своей физической природе — у обычных компьютеров нет физического тела, они могут существовать и без него.
Основы роботов

У подавляющего большинства роботов действительно есть общие черты. Прежде всего, почти у всех роботов есть подвижное тело. Некоторые обладают только моторизованными колесами, у других есть десятки подвижных сегментов, как правило, из металла или пластика. Как кости в вашем теле, отдельные сегменты соединяются вместе с помощью суставов.
Колеса робота и поворотные суставные сегменты активизируются при помощи приводов разного рода. Некоторые роботы используют электродвигатели и соленоиды в качестве актуаторов (приводов); некоторые используют гидравлическую систему; некоторые — пневматическую систему (на основе сжатых газов). Роботы могут использовать все эти типы приводов.
Робот нуждается в источнике питания, чтобы управлять этими приводами. Большинство роботов либо оснащены батареей, либо работают от розетки. Гидравлическим роботам нужен насос для создания давления в гидравлической системе, а пневматическим роботам нужен воздушный компрессор или баллоны со сжатым воздухом.
Все приводы подключаются к электрической цепи. Цепь напрямую питает электродвигатели и соленоиды, что активизирует гидравлическую систему при помощи электрических клапанов. Клапаны направляют сжатую жидкость через машину. Для перемещения гидравлической ноги, например, оператор робота должен открыть клапан, ведущий от жидкостного насоса к поршневому цилиндру, закрепленному на ноге. Жидкость под давлением будет двигать поршень, толкая ногу вперед. Чтобы двигать конечностями в обоих направлениях, роботы используют поршни, которые могут толкаться в обе стороны.
Компьютер робота управляет всем, что подключено к цепи. Чтобы передвигать робота, компьютер активирует все необходимые двигатели и клапаны. Большинство роботов можно перепрограммировать, чтобы изменить поведение — достаточно просто ввести новую программу в компьютер.
Не у всех роботов есть система сенсоров, и лишь некоторые обладают способностью видеть, слышать, чувствовать запах или вкус. Самая распространенная способность робота — способность ходить и наблюдать за своим перемещением. Стандартная конструкция использует колеса с щелью в суставах робота. Светодиод на одной стороне колеса пускает луч света через щель, чтобы подсветить датчик света на другой стороне колеса. Когда робот движет определенным суставом, колесо с щелью крутится. Щель разбивает луч света по мере вращения колеса. Световой датчик считывает поведение светового луча и передает данные на компьютер. Компьютер точно может сказать, как вращается сустав в определенной модели. По тому же принципу работает компьютерная мышь.
Это основы робототехники. Робототехники могут комбинировать эти элементы в бесконечное число способов создания роботов неограниченной сложности.
Роботизированный манипулятор

Термин «робот» пришел к нам от чешского слова «robota», что означает буквально «принудительный труд». В принципе, это слово отлично описывает большинство роботов. Чаще всего роботы делают тяжелую работу, монотонно трудятся на производстве. Также они решают задачи, которые сложны, опасны или скучны для людей.
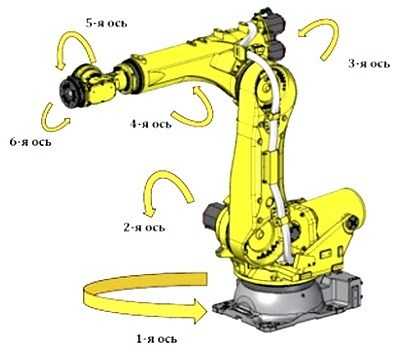
Наиболее распространенный вид робота — это роботизированный манипулятор. Типичный манипулятор состоит из семи металлических сегментов, соединенных шестью суставами. Компьютер управляет роботом, вращая отдельные шаговые двигатели, подключенные к каждому суставу (некоторые крупные манипуляторы используют гидравлику или пневматику). В отличие от обычных двигателей, шаговые двигатели двигаются точными шажками. Это позволяет роботу перемещать руку очень точно, в точности повторяя одно и то же движение снова и снова. Робот использует датчики движения, чтобы убедиться, что совершает движения правильно.
Промышленный робот с шестью суставами напоминает человеческую руку — у него есть подобия плечу, локтю и запястью. Как правило, плечо установлено на неподвижной базовой структуре, а не на подвижном теле. У такого типа робота есть шесть степеней свободы, то есть он может поворачиваться в шести разных направлениях. Для сравнения, человеческая рука имеет семь степеней свободы.
Задача вашей руки — перемещаться с места на место. Аналогичным образом, задача манипулятора — перемещать концевой эффектор с места на место. Вы можете оснастить манипулятор разными концевыми эффекторами, предназначенными для конкретных задач. Один из распространенных эффекторов — упрощенная версия руки, которая может хватать и переносить разные объекты. Манипуляторы часто обладают встроенными датчиками давления, которые предписывают компьютеру, с какой силой захватывать конкретный объект. Это позволяет роботу не ломать все, что он хватает. Другие конечные эффекторы включают паяльные лампы, дрели и распылители порошка или краски.
Промышленные роботы предназначены для того, чтобы делать одни и те же вещи, в контролируемой среде, снова и снова. Например, робот может закручивать колпачки на тюбиках с зубной пастой. Чтобы научить робота делать это, программист описывает порядок движения, используя ручной контроллер. Робот записывает последовательность движений в память и делает это снова и снова, когда новый продукт поступает на конвейер.
Большинство промышленных роботов работает на конвейерах, собирая автомобили. Роботы делают это более эффективно, чем люди, поскольку более точны. Они всегда сверлят в одном и том же месте, затягивают болты с одной и той же силой, независимо от того, сколько часов проработали. Сборочные роботы также важны для компьютерной отрасли. Весьма сложно точно собрать крошечный микрочип силами человека.
Мобильные роботы
Манипуляторы весьма просто собрать и написать для них программу, поскольку они работают в ограниченном пространстве. Но все становится немного сложнее, если вы отправляете робота в мир.
Первое препятствие заключается в том, чтобы дать роботу рабочую систему передвижения. Если робот будет двигаться только по гладкой земле, колеса или гусеницы будут лучшим вариантом. Колеса или гусеницы также могут работать на грубой земле, если будут достаточно большими. Но чаще всего робототехники задумываются о ногах, поскольку их легче адаптировать. Строительство роботов с ногами также помогает ученым понимать естественное движение — полезное упражнение для биологов.
Как правило, гидравлические или пневматические поршни перемещают ноги робота вперед и назад. Поршни крепятся к разным сегментам ног так же, как мышцы крепятся к разным костям. Но заставить все эти поршни работать должным образом — сложная задача. Когда вы были ребенком, ваш мозг пытался выяснить, как нужно точно двигать мышцами, чтобы стоять на двух ногах и не падать. Аналогичным образом, конструктор робота должен определить правильную комбинацию поршневых движений, участвующих в ходьбе и запрограммировать эту информацию в компьютер робота. Многие мобильные роботы оснащены встроенной системой баланса (набором гироскопов, например), которая подсказывает компьютеру, когда нужно исправить движение.
Прямохождение (ходьба на двух ногах) — довольно нестабильно, поэтому ему сложно научить роботов. Чтобы создать стабильного робота-ходока, конструкторы часто наблюдают за миром животных, особенно насекомых. Шестиногие насекомые обладают невероятно хорошим балансом и адаптируются к широкому набору местностей.
Некоторые мобильные роботы управляются дистанционно — человек говорит им, что делать и когда. Дистанционное управление может осуществляться с помощью провода, радио или инфракрасных сигналов. Роботы с удаленным управлением часто называются кукольными роботами, и они полезны для работы в опасных или труднодоступных условиях — например, в глубокой воде или в жерле вулкана. Некоторые роботы управляются дистанционно лишь отчасти. Например, оператор может отправить робота в определенное место, а обратно робот уже сам найдет дорогу.
Как видите, роботы чертовски похожи на нас.
Работа для робота: кто полезнее — машина или человек?
На заводах и фабриках роботы давно перестали быть в диковинку. Правда, от тех, которых мы привыкли видеть в кино, они существенно отличаются — по сути, это автоматизированные станки, которые благодаря возможности перепрограммирования или использования нескольких программ одновременно применяются для выполнения различных производственных процессов. Пока это надежные помощники обычных рабочих. Но не заменят ли они их в один прекрасный день полностью? Не доберутся ли до быта? В этом мы попытались разобраться, сопоставив много различных факторов.
Где применяются
Впервые применять такие устройства начали в США. Первые промышленные роботы там появились в середине 50-х годов прошлого века. Сегодня же без них трудно представить любое современное производство, так как используются они почти во всех сферах — от грубых видов работ до таких тонких операций, как черчение, резьба по дереву или металлу, сборка мелких компонентов устройств.
Если говорить конкретнее, то роботы применяются в машиностроении, где самые распространенные устройства — это автоматические манипуляторы. Они занимаются сваркой, резкой, сборкой компонентов, перемещением массивных грузов, сортировкой готовой продукции и другими видами работ.
В металлургии это машины непрерывного литья заготовок, использование которых существенно выгоднее традиционных методов изготовления стали, а также автоматизированные подъемно-транспортные машины, манипуляторы и станки для резки металла. В химической промышленности, где для человека в силу специфики отрасли условия труда очень тяжелы, роботы применяются для работы с опасными, ядовитыми и токсичными материалами, а также для обеспечения безопасности людей. Например, газоулавливатели в режиме нон-стоп мониторят состояние воздуха и подают сигнал тревоги при первом обнаружении в воздухе опасных веществ или при превышении их допустимой концентрации.
Легкая промышленность тоже не остается в стороне: на крупных предприятиях роботизированное оборудование уже давно отвечает за упаковку произведенных товаров, их сортировку и фасовку (например, распределение пищевой продукции по таре). Кроме того, такие устройства могут контролировать качество продукции (например, находить дефектные изделия на транспортной ленте и снимать их с нее).
Используются такие устройства и для приготовления пищи, например, суши.
В сфере охраны здоровья роботы нашли основное применение в хирургии. Первая успешная операция с использованием робота была проведена в 1985 году. Сегодня при помощи роботов-хирургов серии Da Vinci выполняются такие сложные вмешательства, как абляция тканей сердца, желудочное шунтирование, удаление мочевого пузыря и другие. Кончено, автоматами продолжает управлять человек — к самостоятельной работе роботы пока не готовы. Но даже такой подход позволяет существенно облегчить процесс операции, снизить болевой синдром и риск инфицирования, а также послеоперационных осложнений.
Присутствуют роботы и в повседневной жизни. Это разнообразные уборщики, которых можно найти во многих квартирах. Самые распространенные из них — роботы-пылесосы — всем известные забавные диски, которые шустро катаются по полу и собирают с него пыль и мелкий мусор. Но кроме них есть еще роботы для мытья полов и комплексные уборщики — это все те же диски, оснащенные дополнительными модулями.
Кроме них существуют роботы-игрушки, социальные роботы, используемые для терапии и оказания помощи людям, и роботы-промоутеры, использующиеся в рекламных целях на выставках, презентациях и прочих мероприятиях.
В чем преимущества
Если сравнивать пользу, которую приносят роботы, с тем, что умеют делать люди, то прежде всего нужно отталкиваться от сферы применения устройств. Например, бытовой робот-пылесос пока не в состоянии заменить человека. Он не вытрет пыль на мебели, не помоет окна и сантехнику, не вычистит плиту. А робот-промоутер хоть и может рассказать все по заданной теме, но вряд ли убедит купить товар прямо сейчас. А такой талант есть у многих людей. Поэтому говорить о преимуществах роботов в бытовом плане не приходится. Такие устройства приобретают, чтобы избавить себя от нескольких надоедливых рутинных дел, таких, например, как ежедневное подметание, использование пылесоса или стрижка газона.
Но стоит отойти от этой темы и обратить свое внимание на другие сферы жизни, как картина меняется. В промышленности автоматизация производства дает существенное улучшение как качества работы, так и ее доходности. Не даром в прошлом году во всем мире продали свыше 168 тыс. новых роботов-манипуляторов и лишь немногим меньше (166 тыс.) двумя годами ранее. А по прогнозам экспертов, к концу следующего года общее количество функционирующих на предприятиях промышленных роботов достигнет 1,57 млн. единиц.
Преимущества таких автоматов перед человеком очевидны: на конвейере практически до нуля снижается вероятность брака при сборке, да и любую монотонную работу, где человеку нужно длительное время быть внимательным и сконцентрированным, робот выполняет лучше, так как не устает и ему это не надоедает. Он может трудиться круглый год по три смены в сутки, то есть практически без перерыва, точность его работы выше, чем у человека, ему не страшна вредная или опасная для людей среда, а вместе с другими средствами автоматизации производства использование роботов намного экономически выгоднее, чем человеческий труд.
Если говорить о медицине, то при помощи манипуляторов робота операции можно проводить более филигранно, чем с использованием традиционных инструментов. Врач благодаря миниатюрной камере и монитору видит внутренности пациента как на ладони, что позволяет ему работать только с нужными участками, не задевая здоровые. А возможность точечного проникновения манипуляторов и их компактность позволяют практически не оставлять следов на теле пациента, не делать крупные разрезы, после которых остаются некрасивые шрамы.
Кто производит, сколько стоят
Производителей промышленных роботов довольно много, но, как и в любой сфере, тут есть свои лидеры, продукция которых пользуется большим спросом по всему миру, в том числе и в СНГ. Это шведско-швейцарская компания АВВ, немецкая KUKA, Kawasaki Robotics и Yaskawa America — американские подразделения японских Kawasaki и Motoman соответственно, а также чисто японский производитель Fanuc. Эти компании имеют представительства во многих странах мира и еще больше официальных реселлеров продукции, в том числе и в странах СНГ.
Это, например, в России — холдинг «Белфингрупп», «Робототехника», «Интервесп», «Иннотех Роботик Системс» и пр. В Украине KUKA UKRAINE, АББ Украина и другие.
Цена промышленных роботов зависит от того, в какой комплектации поставляется устройство. Полноценная система состоит из собственно робота с контроллером, рабочего инструмента, позиционирующего устройства, систем безопасности и других специальных компонентов. В то же время в рамках одной системы могут быть десятки роботов-манипуляторов, цена на которые существенно отличается от системы в целом.
Например, новые многопрофильные промышленные манипуляторы в СНГ можно приобрести по таким ценам: от 40 тыс. евро по отдельности (менее продвинутые — дешевле) и от 70 тыс. евро в рабочем комплексе.
Б/у устройства стоят дешевле — от 20 тыс. евро. Кстати, такие роботы пользуются популярностью, так как позволяют существенно сэкономить. При этом на них распространяется гарантия (заводская или от продавца), а большинство реселлеров проводит регулярные профилактические осмотры устройств и их сервисное обслуживание. Благодаря этому (и соблюдению условий эксплуатации) срок службы промышленных роботов составляет более 10 лет.
В медицине системы Da Vinci обходятся примерно в $1,5—2 млн. Техобслуживание и затраты на эксплуатацию составляют $100—150 тыс. в год. Но и операции на них не дешевы — в США они стоят порядка $1,5—2 тыс.
Роботы вытеснят людей
Правда, только с заводов, но не сейчас, и далеко не везде. Арифметика тут проста. По данным аналитиков The Economic Observer, в разных регионах Китая, этого промышленного локомотива мировой экономики, зарплаты рабочих на заводах растут на 10—20% в год. Цена же на роботов в среднем падает на 4% в год, плюс все увеличивается сегмент б/у устройств. Похожая ситуация и в других регионах — США, Европе, СНГ. Только, в отличие от Китая, большие суммы тут идут и на социальное обеспечение рабочих, выплату больничных, отпускных, декретных, соблюдение норм трудового законодательства и техники безопасности. При этом люди работают определенное количество часов в неделю, на их продуктивности сказывается много факторов: самочувствие, настроение, даже поражение любимой команды или погода. Вот и выходит, что робот, который всех этих проблем лишен и может заменить сразу несколько десятков человек, будет выгоднее производителю. Легче один раз крупно потратиться и платить зарплату только операторам, чем большому количеству рабочих, тем более, что расходы на ремонт и сервисное обслуживание обычно покрываются гарантией и договорами с продавцами.
Например, генеральный директор Hon Hai Precision Industry Co Терри Го сообщил, что на заводах Foxconn, где собирают продукцию Apple, установят около 10 тыс. фирменных роботов Foxbots (использующихся только для собственных нужд), стоимость каждого из которых составит $20—25 тысяч. А каждый год их количество будет увеличиваться на 30 тыс. И хоть, по заверениям директора, эти роботы будут только помогать, а не заменять рабочих, собирающих шестые iPhone, многие аналитики полагают, что это только первый шаг в переходе к автоматизированному производству.
С другой стороны, в СНГ и западных странах правительства и профсоюзы не заинтересованы в массовых сокращениях, которые может вызвать повальная роботизация. Поэтому, скорее всего, тут будет найден некий симбиоз. И несмотря на то, что в производстве роботы эффективнее, а в долгосрочной перспективе — и дешевле рабочих, они с ними спокойно уживутся.
А вот в медицине и быту людям пока опасаться нечего. Система Da Vinci не проведет операцию без хирурга и ассистентов, так же как и робот-пылесос не выполнит свою работу без человека. Да и рабочим на самом деле волноваться нечего. Пускай роботы трудятся лучше, но если у человека прямые руки, он никогда не пропадет. В любом случае, роботы хоть во многом и превосходят людей в работе, но управляет ими, тем не менее, человек.
Промышленные роботы. Виды и устройство. Работа и применение
Промышленные роботы все чаще применяются на заводах и предприятиях. Их используют для осуществления функций управления, перемещения и движения в различных производственных процессах. Главная их особенность в том, что они не устают. Роботы могут работать круглосуточно без какого-либо участия человека, ведь для их функционирования нужна только заложенная программа, по которой они будут действовать. Они могут выполнять только определенные действия, но чаще всего их используют в автоматизированных производственных системах.
Благодаря использованию роботов удается создать полный цикл производства, который обеспечивает производительность и точность на весьма высоком уровне. Кроме того, практически полностью исключаются ошибки в производстве, которые так свойственны людям. Промышленная робототехника заявила о себе в 1961 году. Именно тогда был получен первый патент на робота. Однако первое серийное производство роботов началось в далеком в 1956 году. Основное развитие роботы для промышленности получили в 60-70-ых годах двадцатого века. Именно в этот период был создан прототип современного робота, который напоминал человеческую руку и имел шесть степеней свободы.
Виды
На текущий момент промышленные роботы условно можно поделить на три категории, в которых также можно выделить свои подвиды:
- Автоматические устройства. В эту категорию входят программные, адаптивные и биотехнические роботы.

- Программные представляют самую простейшую разновидность роботов, которые управляются автоматически. Эта разновидность широко применяется вследствие их не дороговизны. Они находят широкое применение на предприятиях для совершения простых операций по запланированной технологии. В большей части случаев у таких устройств нет сенсоров. При этом все действия производятся по циклической программе, которая заранее закладывается в блок памяти.
- Адаптивные. В отличие от первой разновидности такие роботы имеют сенсоры, а также ряд сопутствующих программ. Благодаря сигналам, которые идут к управляющей системе от всевозможных датчиков, происходит анализ окружающей обстановки. В результате полученных данных, робот может принимать решение, как ему действовать дальше. К примеру, он может начать выполнять другую операцию, если невозможно выполнить первую.
- Обучаемые. Подобные роботы способны учиться, то есть они выполняют действия согласно предыдущему обучению. К примеру, люди создают порядок действий, которые закладываются в блок управления робота.
- Интеллектуальные. Данные роботы имеют зачатки искусственного интеллекта, то есть они при помощи сенсорных датчиков могут без помощи людей воспринимать окружающую обстановку. То есть они создают виртуальное пространство, в котором могут ориентироваться и принимать решения о последующих действиях. То есть они могут обучаться по мере поступления опыта.
- Биотехнические устройства. В эту категорию входят командные, копирующие и полуавтоматические роботы.
- Командные. Это своего рода манипуляторы, которые дистанционно управляются оператором. Оператор подает команды на движение каждому его сочленению. Если говорить прямо, то это роботы только наполовину.
- Копирующие. Это манипуляторы, которые производят копирование действия, совершаемые оператором в заданный момент времени. К примеру, человек надевает перчатку и двигает пальцами, то и копирующий робот также будет двигать своими железными пальцами.
- Полуавтоматические. Для их управления оператору необходимо лишь задавать перемещение органа манипулятора. При этом система управления устройства сама согласует все необходимые движения и при необходимости выполнит их корректировку.
- Интерактивные промышленные роботы. В эту категорию входят автоматизированные, супервизорные и диалоговые роботы.

- Автоматизированные. Это роботы, где чередуются режимы автоматического управленческого процесса с биотехническими.
- Супервизорные. Это роботы, которые выполняют работу автоматически по заданному циклу, однако перемещение от одного этапа к следующему осуществляется по командам оператора.
- Диалоговые. Это автоматические роботы различного действия, которые могут взаимодействовать с оператором, применяя язык определенного уровня. К примеру, с помощью команд голосом.
Устройство
Промышленные роботы могут иметь различное устройство, что во многом определяется задачами, которые стоят перед ними. Однако на данный момент наиболее распространенными видами подобных устройств являются роботизированные манипуляторы.
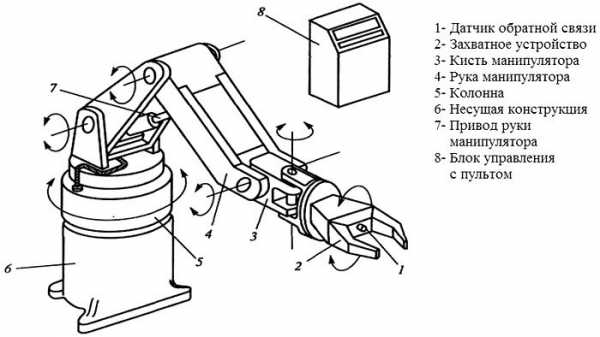
Стандартный манипулятор выполнен из семи сегментов, которые соединяются с помощью шести суставов. Каждый сегмент выполнен из металлического корпуса и проводов. В каждом сегменте присутствуют шаговые двигатели, которые заставляют суставы двигаться. Управление суставами и роботом в целом осуществляется с помощью компьютера, который заставляет вращаться конкретные шаговые двигатели. В некоторых манипуляторах вместо двигателей могут применяться пневматические или гидравлические элементы.
Главная особенность шаговых двигателей в том, что они могут обеспечивать очень точные движения. Если компьютер даст команду суставу передвинуться ровно на 15 мм, то двигатель сделает то, что от него попросят. При этом движение будет точным каждый раз при совершении одного и того же действия.
Чтобы контролировать, правильно ли робот выполняет необходимые действия, применяются датчики движения. Если происходит малейшее отклонение от заданной программы, то происходит корреляция движения. Если же наблюдается значительное отклонение и невозможность его исправления, то сигнал подается на главный компьютер. В результате робот может быть остановлен, чтобы его можно было отремонтировать.
Манипулятор также имеет устройства захвата, которые выполнены в виде человеческой руки с механическими пальцами. При необходимости захвата плоского предмета вместо механических пальцев может применяться пневматическая присоска. В случае необходимости захвата множества деталей может быть задействована конструкция в виде приспособления, специально разработанная для этого. К тому же вместо захватного устройства могут применяться и иные рабочие инструменты, к примеру, пульверизатор, отвертка и так далее.
Промышленные роботы также могут перемещаться по колее, выполненной на полу в виде монорельсов. В случае необходимости движения по неровной поверхности, используются другие конструкции, к примеру, пневматические присоски и тому подобное. Для питания роботов может использоваться аккумулятор, но чаще всего применяется промышленная электрическая сеть. Для управления используется компьютер, который командует роботом через провода или беспроводную связь. Также в самих роботах может быть установлен блок памяти, куда записывается необходимая программа.
Принцип действия
Промышленные роботы, которые имеют 6 суставов, внешне напоминают человеческую руку (плечо, локоть и запястье). В большинстве случаев плечо монтируется на неподвижной основе. В результате такой робот может иметь 6 степеней свободы, а это значит, что он способен двигаться по 6 различным направлениям.
Подобно человеческой руке манипулятор также перемещает концевой эффектор с одного места на другое. При оснащении концевого эффектора различными устройствами, у робота появляется возможность выполнять определенные технологические операции. Одним из наиболее распространенных вариантов является подобие руки, которая позволяет роботу хватать и перемещать объекты с места на место.
Довольно часто манипуляторы имеют встроенные датчики давления, благодаря чему они могут контролировать силу захвата и не ломать все подряд. К примеру, в задачу робота может входить перемещение лампочки с одного места на другое, чтобы проверить работает ли она. Если сила будет высока, то лампочка просто лопнет. Контролирование силы сжатия гарантирует, что лампочка не пострадает. При помощи других конечных эффекторов могут использоваться распылители порошка, различные дрели и так далее.
Управление такими роботами может быть выполнено:
- С помощью программы.
- Адаптивного управления. В этом случае используются сенсорные устройства. Получаемые сигналы анализируются, после чего уже выполняется необходимое действие.
- Управление осуществляется людьми, но на расстоянии.
- Своеобразным искусственным интеллектом.
Применение

Промышленные роботы могут применяться практически повсеместно. Уровень автоматизации сегодня достиг таких высот, что они могут полностью заменить человека. При этом один робот способен заменить усилия нескольких и даже десятков специалистов. Робот не будет знать отдыха и покоя, ему не нужна зарплата и отчисления в многочисленные социальные фонды, ему не нужно спать и есть. Ему не знакомы человеческие ошибки, приводящие к браку или поломке дорогостоящего инструмента и оборудования. Именно поэтому сегодня многие производства стараются автоматизировать.
Промышленные роботы часто используют для:
- Контактной сварки.
- Плазменной резки.
- Покраски.
- Литья металлов.
- Нанесения лака.
- Дуговой сварки.
- Загрузочно-погрузочных работ.
- Бесконтактной обработки.
- Транспортирования изделий.
- Обработки резанием.
- Упаковки.
- Фрезерных операций.
- Раскроя материалов.
- Контрольно-измерительных операций.
- Обработки крупногабаритных деталей.
- Раскладки уложенной продукции.
- Изготовления объемных конструкций и тому подобное.
Как выбрать
- Если решили оснастить свое производство роботами, то нужно понимать для чего их покупаете. Одни типы роботов предназначены только для выполнения определенной технологической операции, другие – могут выполнять сразу несколько. В тоже время стоимость последних может быть на порядок выше, чем первых.
- Промышленные роботы – это технически сложные устройства, которые требуют грамотного программирования, настройки и обслуживания. Поэтому важно обращаться за покупкой в компанию, которая сможет не только продать, но и обеспечить полноценное его обслуживание.
- Если не хотите думать, как вклинить промышленного робота в технологическую операцию, как его подключить и использовать, то стоит покупать робота с услугой под ключ. Специалисты продающей компании сами подберут робота под Ваши требования, привезут, установят, наладят технологический процесс, проведут обучение и обеспечат его обслуживание.











"Питер - АТ"
ИНН 780703320484
ОГРНИП 313784720500453
Новости
-
Отзывы о Питер-АТ
Спасибо нашим клиентам за отзывы о нас:
-
Акция на ремонт вариаторных трансмиссий

-
Замена масла в двигателе в подарок
При замене масла в АКПП замена масла в двигателе бесплатно! -
Клиенту на заметку
-
Контрактные АКПП в СПб
