Справочник датчики холла
Интегральные датчики Холла компании Honeywell
Эффект Холла в классическом понимании был открыт еще в 1879 году Эдвином Холлом. Данный эффект заключается в формировании поперечной разности потенциалов в проводнике с током, помещенном в магнитное поле. Однако практическое применение данный эффект нашел сравнительно недавно — примерно 30 лет назад, когда стали доступными полупроводниковые технологии, позволившие создать недорогие и практичные твердотельные датчики. Такие датчики широко используются в системах, где возможно преобразование контролируемой величины в изменение магнитного поля, которое впоследствии легко проконтролировать датчиком Холла. К числу таких величин относятся переменный/постоянный ток или напряжение, давление, температура, скорость, вибрация и др. Кроме того, эффект Холла идеален для построения разнообразных датчиков положения, которые находят обширное применение в системах автоматики; в технике бытового, коммерческого, медицинского, научного и промышленного назначений; на транспорте и в современных приводах. В настоящий момент индустрия таких датчиков переживает расцвет, а компания Honeywell, крупнейший в мире производитель датчиков, активно продвигает на рынок изделия указанных типов.
Ассортимент «холловских» датчиков Honeywell в основном представлен интегральными приборами в корпусах для поверхностного или сквозного монтажа. В общем случае такие датчики представляют собой трехвыводной прибор с двумя выводами питания и одним аналоговым или цифровым выходом. Их ассортимент и краткие рабочие характеристики представлены в таблице 1.
Таблица 1. Ассортимент датчиков Холла компании Honeywell
| SS30AT1) SS40A SS50AT | Цифровая биполярная | 4,5…24 | 10 | втекающий | SOT-23 SIP-3 SOT-89B | -40…125 |
| SS311PT SS411P | Цифровая биполярная | 2,7…7 | 14 | втекающий | SOT-23 SIP-3 | -40…150 |
| Серия SS340RT Серия SS440R | Цифровая униполярная | 3…242) 3…24 | 8 | втекающий | SOT-23 SIP-3 | -40…150 |
| SS351AT SS451A | Цифровая всеполярная | 3…242) 3…24 | 9 | втекающий | SOT-23 SIP-3 | -40…150 |
| SS361RT SS461R | Цифровая истинная биполярная | 3…182) 3…18 | 8 | втекающий | SOT-23 SIP-3 | -40…150 |
| Серия SS400 Серия SS500 | Цифровая униполяроная, биполярная или истинная биполярная | 3,8…30 | 10 8,7 (5 В) | втекающий | SIP-3 SOT-89 | -40…150 |
| Серия SS41 Серия SS51T | Цифровая биполярная | 4,5…24 | 15 | втекающий | SIP-3 SOT-89 | -40…150 |
| Серия SS421 | Цифровая биполярная | 4,5…16 | 15 | втекающий | SIP-4 | -40…105 |
| SS42R | Цифровая истинная биполярная (симметричная) | 4,5…16 | 11 | втекающий или вытекающий | SIP-4 | 0…100 |
| SS46 | Цифровая истинная биполярная (симметричная) | 4,5…24 | 10 | втекающий | SIP-3 | -40…150 |
| VF526DT | Цифровая истинная биполярная (2 канала) | 3,4…24 | 14 | втекающий (2 канала) | SOT-89 | -40…125 |
| Серия 9 1SS | Линейная | 8…16 | 19 | вытекающий | Керамич. SIP-3, керамич. с ламелями | -40…150 |
| Серия SS490 Серия SS491B | Линейная | 4,5…10,5 | 10 | втекающий или вытекающий | SIP-3 | -40…150 |
| Серия SS49E Серия SS59ET | Линейная | 2,7…6,5 | 10 | вытекающий | SIP-3 SOT-89 | -40…100 |
| Серия SS94 | Линейная | 4,5…12,6 | 30 | втекающий или вытекающий | Керамич. SIP-3, керамич. с ламелями | -40…150 |
| Примечания: 1. Красным цветом выделены новики 2009 года. 2. Исключение: при работе с температурами более 125°С диапазон напряжения питания ограничен до 3…12 В. |
Датчики доступны в корпусах трех типов, в т.ч. SOT-23, SOT-89 (для поверхностного монтажа) и SIP (для сквозного монтажа), который также можно назвать плоской версией популярного корпуса TO-92 (см. рисунок 1).
Рис. 1. Корпуса датчиков Холла компании Honeywell
В зависимости от вида передаточной функции (ПФ) датчики разделяются на линейные и цифровые (см. рисунок 2). Как видно из рисунка, цифровые датчики работают как управляемые магнитным полем коммутаторы, которые активизируют свой выход при одном его уровне и отключают при другом. Отсюда происходит их альтернативное наименование — магнитоуправляемые коммутаторы. В зависимости от знака пороговых уровней, цифровые ПФ разделяются на униполярную, биполярную и всеполярную. Униполярные датчики реагируют на магнитное поле определенного знака (положительное или отрицательное), поэтому в конечном применении они требуют определенной ориентации полюсов магнита.
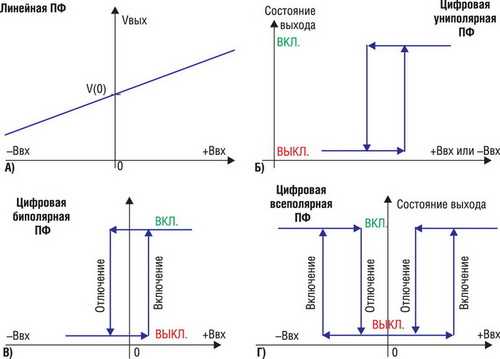
Рис. 2. Передаточные функции датчиков Холла
Данная особенность вызывает некоторые неудобства при сборке или установке датчиков, и в связи с этим были разработаны всеполярные датчики, которые равным образом реагируют на приближение северного и южного полюсов магнита, и поэтому некритичны к их ориентации. Необходимо отметить, что представленные на рисунке 2 цифровые ПФ для простоты восприятия имеют идеализированный вид. Фактические пороги включения и отключения могут варьироваться в зависимости от температуры, а также от одного датчика к другому. Эту особенность важно учитывать при выборе биполярных датчиков. Идеальный биполярный датчик, как показано на рисунке 2, реагирует на смену знака магнитного поля, активизируясь при положительном знаке и отключаясь при отрицательном. Однако в реальности, ввиду возможного разброса порогов включения/отключения в достаточно широких пределах, вероятно смещение ПФ вдоль оси абсцисс. Проще говоря, среди приобретенных биполярных датчиков некоторое количество на практике может оказаться униполярными, причем реагирующими либо на положительное магнитное поле, либо на отрицательное. Однако в ассортименте Honeywell есть датчики и с гарантированной биполярностью передаточной функции. В таблице 1 передаточные функции таких датчиков отмечены как «истинная биполярная». Кроме того, в таблице отмечена часть истинных биполярных датчиков, для которых гарантируется симметричность ПФ относительно оси ординат.
Помимо ПФ, датчики также различаются схемотехникой выходного каскада. Она может быть однотактной (выходной ток может протекать только в одном из направлений) и двухтактной (выходной ток может протекать в любом из направлений). Выходной каскад большинства цифровых датчиков выполнен по схемотехнике с открытым коллектором, при которой допускается протекание только втекающего тока (т.е. нагрузка управляется по отношению к плюсу питания). Исключения: SS311PT, SS411P со встроенным подтягивающим резистором к плюсу питания и SS42R с двумя двухтактными комплементарными выходами. Также необходимо отметить, что под активным состоянием выхода цифрового датчика (ВКЛ согласно рисунку 2) понимается нахождение выхода в низком состоянии. Исключением является упомянутый только что четырехвыводной датчик SS42R, у которого имеется дополнительный выход с активным высоким уровнем.
В представленном ассортименте имеются несколько датчиков с повышенной степенью интеграции. Речь идет о биполярных датчиках SS421 и VF526DT. Датчики серии SS421 предназначены для обнаружения недопустимого снижения частоты вращения двигателя или вентилятора. Они активизируют свой выход, когда частота следования импульсов на выходе встроенного цифрового датчика Холла становится ниже порогового уровня. Порог и задержка срабатывания задаются путем подключения к специальному выводу RC-цепи с соответствующими параметрами. В свою очередь, VF526DT объединяет два независимых датчика Холла и логику обнаружения направления движения. Таким образом, пользователю, помимо импульсного выхода SPEED, также доступен выход DIRECTION, сигнализирующий о текущем направлении движения.
Многие представленные в таблице 1 датчики являются новинками 2009 года (выделены красным цветом). Новые датчики обладают множеством особенностей, позволяющих снизить себестоимость конечной продукции, а также улучшить ее надежность и экономичность. К источникам снижения себестоимости новых датчиков можно отнести следующие:
- доступность датчиков в более компактных корпусах SOT-23, упакованных в ленту на бобину (более низкая стоимость самого корпуса, возможность снижения размеров платы, более дешевая технология монтажа);
- доступность датчиков с повышенной чувствительностью (возможность применения более дешевых магнитных материалов и более компактной магнитной системы);
- встроенная защита от подачи питания неверной полярности исключает необходимость ее внешней реализации;
- расширение нижней границы напряжения питания до 3 и даже 2,7В, что обеспечивает простоту применения датчиков в низковольтных системах;
- появление всеполярных датчиков (SS351AT, SS451A), которые по сравнению с униполярными датчиками некритичны к ориентации полюсов магнита, что потенциально дает возможность уменьшить затраты на сборку (или монтаж) датчика;
- доступность датчиков со встроенным на выходе резистором, подтягивающим к плюсу питания (SS311PT, SS411P), что позволяет уменьшить затраты на приобретение и монтаж внешнего резистора в тех применениях, где необходима его установка для формирования уровня логической единицы.
Новые датчики также доступны в традиционном корпусном исполнении SIP, что дает возможность модернизации выпускаемой продукции путем прямой замены на более совершенный аналог с множеством конкурентных преимуществ. Помимо всеполярной ПФ, возможности низковольтного питания, улучшенной экономичности и более высокой чувствительности, к числу таких преимуществ также относится улучшенная температурная стабильность, которая проявляется в несущественной зависимости порогов срабатывания и их симметричности от температуры в пределах широкого диапазона (-40…125/150°С). Убедиться в этом можно на примере графиков зависимости порогов срабатывания от температуры датчиков SS451A и SS351AT, представленных на рисунке 3.
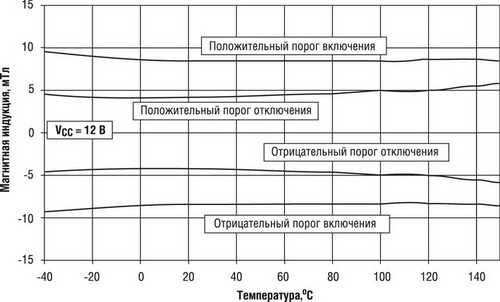
Рис. 3. Графики зависимости порогов срабатывания от температуры датчиков SS451A и SS351AT
Рассмотренные датчики Холла идеальны для построения импульсных датчиков скорости и дискретных датчиков положения в разнообразных устройствах бытового и промышленного назначения, в т.ч. в устройствах с функцией контроля частоты вращения электродвигателя и контроля концевых положений элементов исполнительных механизмов, в системах автоматизации поточных линий, в робототехнике и т.д. На основе цифровых датчиков Холла также возможна реализация различного рода реле, реагирующих на изменение физической величины, например, давления, расхода, электрического тока, температуры и т.п. Пример такого реле демонстрирует рисунок 4а, где упрощенно представлена конструкция токового реле, предназначенного для сигнализации о токовой перегрузке или о наличии тока в цепи. На этом рисунке также представлены некоторые другие варианты применения цифровых датчиков Холла, в т.ч. датчик уровня поплавкового типа (рис. 4б); кнопка для сложных условий применения, таких как повышенный уровень влаги и пыли, взрывоопасность и др. (рис. 4в); импульсный датчик расходомера, где вращение крыльчатки преобразуется в последовательность импульсов, количество которых пропорционально объему прокачанной по трубе жидкости.
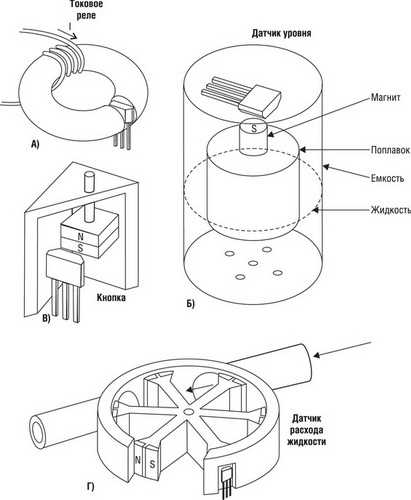
Рис. 4. Примеры областей применения цифровых датчиков Холла
Компания Honeywell также выпускает ряд линейных датчиков Холла (замыкают таблицу 1), которые прекрасно подходят для реализации разнообразных устройств, в т.ч. датчиков тока, вибрации, уровня и положения, считывателей магнитных карт, металл-детекторов и весов. Выходной каскад линейных датчиков Honeywell выполнен по ратиометрической архитектуре, что упрощает их применение за счет исключения необходимости применения прецизионного ИОН. Это означает, что у этих датчиков напряжение V(0) равно половине напряжения питания. Кроме того, датчики способны измерять как положительные, так и отрицательные значения магнитной индукции. Выпускается множество исполнений датчиков, различающихся входным диапазоном и степенью прецизионности передаточной характеристики. В частности серию SS490 образуют два датчика с разным входным диапазоном и наклоном передаточной функции, однако каждый из этих датчиков доступен в нескольких исполнениях, различающихся разбросом выходного напряжения и температурной стабильностью (см. таблицу 2).
Таблица 2. Рабочие характеристики линейных датчиков Холла серии SS490
| Входной диапазон (typ), мТл | ±67 | ±67 | ±67 | ±67 | ±84 | ±84 | ±84 |
| Размах выходного напряжения (typ), В | 0,2…VS-0,2 | ||||||
| Выходное напряжение V(0) (Vs=5 В), В | 2,5±0,075 | 2,5±0,075 | 2,5±0,1 | 2,5±0,15 | 2,5±0,075 | 2,5±0,075 | 2,5±0,15 |
| Чувствительность, В/Тл | 31,25±1,25 | 31,25±0,94 | 31,25±1,56 | 31,25±2,5 | 25±1 | 25±0,75 | 2,5±2 |
| Линейность (не более), % | -1,5 | ||||||
| Температурный дрейф V(0) (не хуже), %/°С | ±0,06 | ±0,04 | ±0,07 | ±0,08 | ±0,048 | ±0,03 | ±0,06 |
| Температурный дрейф чувствительности (не хуже), %/°С | -0,01 +0,06 | -0,02 +0,06 | -0,02 +0,07 | -0,02 +0,06 | -0,01 +0,6 | -0,01 +0,06 | -0,02 +0,06 |
Всего доступно семь исполнений датчиков, и поэтому пользователь получает широкие возможности по оптимизации отношения цена-качество. Датчики SS490 также примечательны тем, что их выходной каскад относится к типу «rail-to-rail», что существенно упрощает работу с выходным сигналом в низковольтной системе.
Некоторые примеры использования линейных датчиков демонстрирует рисунок 5.
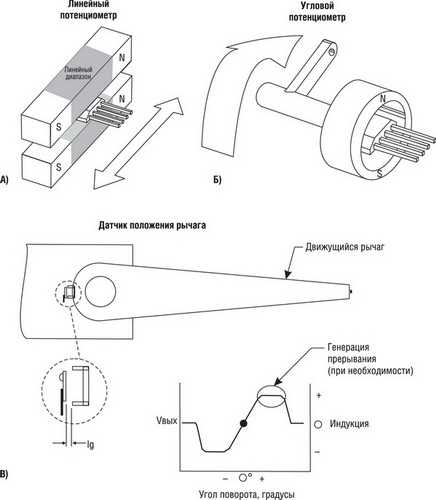
Рис. 5. Примеры областей применения линейных датчиков Холла
На рисунках 5а и 5б представлены более износостойкие альтернативы линейного и углового потенциометров. Приведенные конструкции могут служить основой для построения различного рода задатчиков и органов управления. Такие устройства широко используются в устройствах промышленной автоматики. Пример построения линейного датчика положения демонстрирует рисунок 5в. Здесь решается задача контроля углового положения рычага. Закрепленная на нем магнитная система обеспечивает изменение выходного напряжения как функции угла поворота в соответствии с приведенным графиком. Выходное напряжение датчика может быть подано на вход АЦП для ввода в систему информации об угловом положении, а также, опционально — на вход компаратора напряжения для детектирования концевого положения рычага с последующей генерацией прерывания. Как уже упоминалось, обширной областью применения линейных датчиков Холла является контроль тока [1].
Заключение
Компания Honeywell выпускает широкий ассортимент датчиков Холла с цифровой и линейной передаточной функцией. Они доступны в различных исполнениях, предоставляя пользователю возможность наилучшим образом оптимизировать конечное решение по себестоимости и рабочим характеристикам. В обновленной в 2009 году линейке датчиков Холла учтены все современные тенденции миниатюризации, удешевления и повышения экономичности электронной техники: появились датчики в более миниатюрном корпусе SOT-23, улучшены параметры электропитания, а также добавлен ряд других рассмотренных выше функций.
Более детальную информацию по датчикам Холла, а также другим датчикам компании Honeywell можно получить по ссылке www.honeywell.com/sensing.
Литература
1. Маргелов А. Датчики тока компании Honeywell//Новости электроники, №8, 2006 — С. 18-22.
Получение технической информации, заказ образцов, поставка — e-mail: [email protected]

Honeywell International, Inc. — крупная американская корпорация, производящая электронные системы управления и автоматизации. Корпорация Honeywell International — мировой лидер в области технологий и промышленного производства, входящий в список 100 ведущих компаний, составляемый журналом Fortune. Она известна во всем мире своими разработками в области аэрокосмического оборудования, технологий для эксплуатации зданий и промышленных сооружений, автомобильного оборудования, турбокомпрессоров и ...читать далее
Датчики положения фирмы Honeywell на основе эффекта Холла | Статьи по электронике
Принцип действия датчиков основан на эффекте Холла. Основные преимущества этих датчиков заключается в отсутствии механических движущихся частей и высоком быстродействии (до 100 кГц). Благодаря этому датчики Холла отличаются высокой надежностью, долговечностью и не требуют физического контакта с измеряемой средой.
Датчики Холла широко используются там, где требуются высокая точность и надежность. Они находят применение в безколлекторных двигателях, измерителях различных величин, сварочном оборудовании, бытовых приборах, компьютерах и т.д.
Эффект Холла заключается в возникновении напряжения в проводнике с током в магнитном поле. Возникающее напряжение перпендикулярно протекающему току и пропорционально магнитному потоку. После усиления это напряжение используется для управления выходными каскадами датчиков и внешними схемами.
Выходные каскады датчиков могут быть различных типов – аналоговые, когда выходной сигнал пропорционален магнитному потоку через датчик, и цифровые, имеющие два уровня сигнала на выходе. Аналоговые каскады могут быть выполнены по схеме “открытый коллектор” (NPN) и “источник тока” (PNP). По реакции на магнитное поле датчики распределяются по трем группам: биполярные, однополярные и униполярные. Для включения биполярного датчика требуется воздействие поля положительной полярности, а для выключения – отрицательной. Однополярные датчики измеряют поля любой полярности, а униполярные – только одной (обычно положительной).
Магнитное поле может быть сформировано постоянными магнитами или электромагнитами. Изменение напряженности поля достигается путем перемещения магнита, изменения тока электромагнита или внесением магнитного материала в зазор между датчиком и магнитом. Выпускаются датчики, в которых используются внешние или встроенные в корпус магниты. В последнее время в выходные каскады датчиков Холла вводятся специальные схемы снижения температурной нестабильности датчиков и магнитов, а также схемы линеаризации аналоговых выходов. Для достижения высокой повторяемости параметров от датчика к датчику в процессе производства используется лазерная калибровка элементов схем. Это позволяет производить замену вышедших из строя приборов без последующих подстроек.
Для иллюстрации возможных вариантов исполнения датчиков Холла приводится описание серийных цифровых и аналоговых датчиков фирмы Хонейвелл (Honeywell).
Фирма Хонейвелл выпускает несколько базовых серий цифровых датчиков.
Это специальная высокочувствительная серия 2SSP-датчиков, использование которых позволяет располагать магнит на расстоянии 2 см и более от датчика. Датчики выполнены в пластиковом корпусе с размерами 4,5х4,5х1,5 мм. Выпускаются модификации для поверхностного монтажа с короткими формованными выводами – серия 2SSP-S.
Две серии биполярных цифровых датчиков SS41 и SS11 изготавливаются в миниатюрных корпусах, имеющих размеры 4х3х1,5 мм. Датчики серии SS11 выпускаются в корпусах типа SOT89, предназначенных для поверхностного монтажа (SMD – Surface Mount Device). Все датчики имеют защиту от неправильного подключения и диапазон быстродействия от 0 до 100 кГц.
Датчики серий SS400 и представляют собой приборы, состоящие из собственно датчиков поля и выходных усилителей, и имеющие выход типа “открытый коллектор”. Они выпускаются в миниатюрных пластиковых корпусах с тремя выводами. Специальная конструкция корпуса (Quad-Hall-дизайн) позволяет полностью исключить внутренние механические напряжения. Для компенсации температурного дрейфа параметров предусмотрена специальная схема коррекции. Датчики предусматривают различные варианты работы:
- под действием одного полюса магнита (SS411A, SS413A, SS111A, SS113A);
- обоих полюсов (SS441A, SS443A, SS449A, SS141A, SS143A, SS149A)
- и триггер (SS461A, SS466A, SS161A, SS166A).
Серия SS400 (с индексом S) имеет корпус с формованными для поверхностного монтажа выводами, а серия SS100 – миниатюрный безвыводной SMD-корпус.
Приборы серий 103SR и SR3 представляют собой полностью закрытые датчики в алюминиевом или пластиковом корпусе (диаметр 12 мм, длина 25 мм с резьбой), имеющие защиту от неправильного включения. Внутри серии датчики отличаются друг от друга величиной измеряемого поля и типами выхода. В таблице 1 приведены основные характеристики датчиков рассматриваемых серий.
Таблица 1. Основные характеристики датчиков серий 2SSP, SS41, SS11, SS400, SS100, 103SR и SR3
| Серии цифровых датчиков Холла | |||||
| Основные характеристики | 2SSP (2SSP-S) | SS41, SS11 | SS400 (SS100) | 103SR11A | 103SR12A,3A,4A,7A, SR3F,B,G,C,P2 |
| Напряжение питания (VDC), В | 6…24 | 4,5…24 | 3,8…30 | 4,5…5,5 | 4,5…24 |
| Ток потребления, мA (макс.) | 13,5 | 4…15 | 10 | 4 | 10 |
| Выходное напряжение, В (макс.) | 0,4 | 0,4 | 0,4 | (VDC-1,5) | 0,4 |
| Выходной ток, мA (макс.) | 20 | ||||
| Ток утечки, мкА (макс.) | 10 | ||||
| Температурный диапазон эксплуатации, ° С | -20…85 | -55…150 | -40…150 (125) | -40…100 |
Аналоговые датчики Холла
Фирма Хонейвелл использует лазерную подгонку при изготовлении аналоговых датчиков Холла, что позволяет получать идентичные параметры от образца к образцу и производить замены вышедших из строя приборов без последующих подстроек. Аналоговые датчики представлены сериями SS49, SS19, SS495, SS94 и 103SR.
Датчики серий SS49 и SS19 имеют параметрический линейный выход. Они изготавливаются в миниатюрных корпусах с выводами (серия SS49) и для поверхностного монтажа (SMD) – серия SS19.
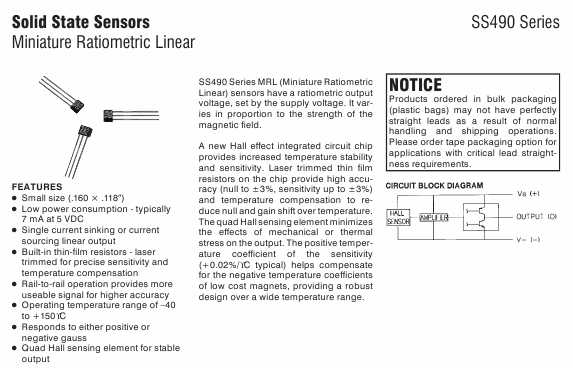
Приборы серии SS495 имеют размеры корпуса 3х4 мм. Эти датчики отличаются низким энергопотреблением (7 мА при напряжении питания 5 В) и линеаризованным выходом. Температурная ошибка для разных датчиков этой серии составляет:
- SS495A – ± 0,06 %;
- SS495A1 – ± 0,04 %;
- SS495A2 – ± 0,07 %.
Датчики серии SS94 имеют специальные встроенные схемы для увеличения температурной стабильности.
Серию аналоговых датчиков Холла 103SR отличает исполнение последних в алюминиевом корпусе с резьбой. В табл. 2 приведены основные характеристики аналоговых датчиков Холла рассмотренных серий.
Таблица 2. Основные характеристики аналоговых датчиков Холла серий SS49, SS19, SS495, SS94 и 103SR.
| Аналоговые датчики Холла | ||||||||||
| Основные характеристики | Серия SS94, модель | SS49/SS19 | SR3F-5 | |||||||
| SS94A1 | SS94A1B | SS94A1E | SS94A1F | SS94A2 | SS94A2C | SS94A2D | SS94B1 | |||
| Напряжение питания (VDC), В | 6,6…12,6 | 4,5…8,0 | 6,6…12,6 | 4,5… 12 | 4…10 | |||||
| Ток потребления (тип/макс), мA | 13/30 | 8/17 | 13/30 | 8/11 | 4 | 3,5 | ||||
| Диапазон, Гаусс ± | 500 | 100 | 500 | 1000 | 250 | 670 | ||||
| Чувствительность, мВ/Гаусс | 5,0 | 1,875 | 5,0 | 25,0 | 5,0 | 2,5 | 1,00 | 3,125 | 0,8 | 0,8 |
| Выходное напряжение при отсутствии поля, В | 1,75…2,25 |
Page 2
Радиосхемы. - Датчик Холла SS526DT
материалы в категории
Датчик Холла SS526DT
Импульсный датчик скорости и направления вращения преобразует скорость и направление вращения деталей механизма в один электрический сигнал для последующего измерения и индикации параметров работы. Системы автоматического управления могут использовать датчик для включения в петлю обратной связи.
Информация, поступающая от датчика, необходима для формирования управляющих сигналов в системах регулирования и стабилизации параметров перемещения механических узлов автоматизированного объекта. Применения такого датчика требует контроль оборотов выходных валов редукторов, определение направления вращения двух и более синхронизируемых механизмов, учет расхода жидкости и многие другие приборы. Датчик использует всего три провода, с помощью которых подается питание и передается сигнал частоты и направления вращения в прибор системы автоматического управления. Датчик предназначен для применения в системах автоматизации поточных линий, транспортных системах и в других системах автоматического управления.
Технические характеристики микросхемы SS526DT
Измеряемая скорость вращения ….. 0,3…3000 об/минТемпература эксплуатации ………… –25…+60 °С
Напряжение питания ……………….6,5…18 Вольт
Краткое описание работы датчика Холла
В основе работы датчика лежит преобразование перемещения в электрический сигнал которое выполняет компонент использующий эффект Холла – микросхема SS526DT производства компании Honeywell.

Микросхема содержит два полупроводниковых элемента, генерирующих разность потенциалов при воздействии магнитного поля. Она позволяет определить скорость и направление вращения. Информация об этих параметрах поступает от микросхемы SS526DT в схему датчика с двух соответствующих выходов в цифровом виде: скорости движения соответствует частота импульсов с выхода Speed (далее Скорость), направлению соответствует логический уровень на выходе Direction (далее Направление).
Конструкция датчика скорости и направления оборотов
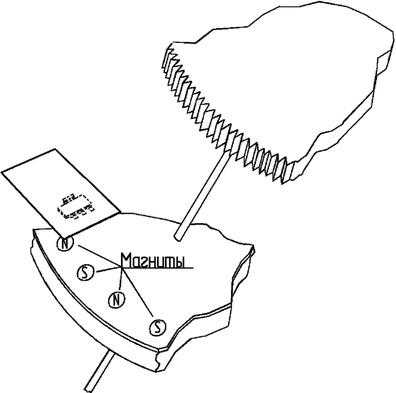
Вращательное перемещение воспринимает вал датчика через закрепленную на нем шестерню. На валу расположен диск, в котором установлены постоянные магниты. Применение неодимовых магнитов (самых сильных постоянных магнитов) позволяет уместить на диске достаточное количество малогабаритных магнитов. Свойство неодимовых магнитов при малых габаритах создавать магнитное поле достаточной напряженности делает их оптимальными для применения в этой конструкции. Установлены магниты таким образом, что полюса магнитов чередуются, что необходимо для работы микросхемы SS526DT. Внутренняя схема SS526DT, имеющая в своем составе триггер, определяет направление движения благодаря смене полярности магнитного поля, которое создается постоянными магнитами. Чем больше магнитов установлено на диске, тем выше дискретность и, следовательно, увеличивается возможность регистрации медленных перемещений, т.е. чувствительность датчика становится выше. Микросхема SS526DT устанавливается на небольшой печатной плате, соединенной проводами с основной схемой датчика, элементы которой расположены на второй печатной плате большего размера. Перемещение полюсов магнитов происходит вдоль корпуса микросхемы SS526DT. Все элементы заключены в металлический защитный экранирующий кожух.
Схема электрическая принципиальная
С выхода датчика скорости и направления поступает сигнал, передающий информацию о скорости оборотов с помощью частоты импульсов, а информация о направлении вращения передается с помощью полярности импульсов.
Выходной сигнал:
Благодаря наличию в схеме датчика источника двуполярного напряжения питания выходной сигнал размахом 5 вольт может иметь отрицательную или положительную полярность.
Функциональная схема датчика скорости и направления оборотов:
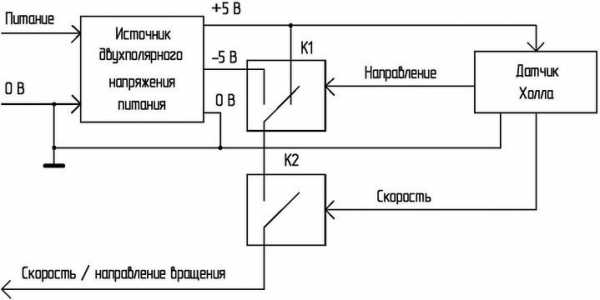
Электрическая схема преобразует сигнал от датчика Холла в выходной сигнал датчика скорости и направления вращения, обеспечивая достаточную нагрузочную способность по току. Для минимизации помех, воздействующих на кабель импульсного датчика, сопротивление приёмника сигнала должно быть небольшим. Нужно, чтобы выходной ток датчика был достаточен для принимающего прибора в целях уменьшения влияния помех, искажающих передаваемую информацию. Питание датчика подается по двум проводам. Третий провод используется для передачи сигнала, полярность которого изменяется относительно общего провода питания. Датчик Холла формирует сигнал, несущий информацию о направлении вращения, который управляет переключателем К1. В зависимости от уровня сигнала переключатель К1 подает на переключатель К2 положительное или отрицательное напряжение. Сигнал скорости датчика Холла управляет переключателем К2. Частота сигнала Скорость, сформированного переключателем К2, соответствует половине количества магнитов, размещенных на диске датчика скорости и направления вращения.
Упрощенная схема включения датчика Холла
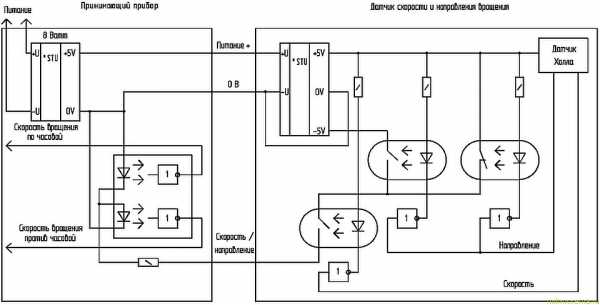
Логические элементы усиливают сигнал Направление, поступающий от датчика Холла. Логические элементы управляют светодиодами оптронов, один из которых работает на замыкание, а другой на размыкание. При низком логическом уровне сигнала Направление светодиоды оптронов не светятся. Также замкнуты контакты оптрона работающего на размыкание, на контакты оптрона сигнала Скорость подано напряжение + 5 вольт от встроенного двухполярного импульсного источника питания. При высоком логическом уровне сигнала Направление через светодиоды оптронов, управляющих полярностью выходного сигнала датчика скорости и направления вращения, проходит ток, положение контактов оптронов таково, что выходной оптрон подключается к напряжению минус 5 вольт. Сигнал Скорость через усиливающий логический элемент поступает на управление выходным оптроном. Под действием сигнала скорость с выхода датчика поступают импульсы, полярность которых задана сигналом Направление. Применение оптрона на выходе датчика позволяет увеличить нагрузочную способность, что дает возможность передавать сигнал увеличенным током для повышения помехоустойчивости.
На входе принимающего устройства сигнал дешифруется перед измерением частоты. С помощью сдвоенного оптрона в принимающем приборе сигнал, несущий информацию о скорости вращательного перемещения направляется на один из проводов, соответствующий направлению перемещения. Провода “Скорость вращения по часовой” и “Скорость вращения против часовой” подключаются к частотоизмерительным контурам схемы принимающего прибора. В зависимости от того, на каком проводе появляется сигнал, схема распознает направление перемещения. При включении светодиодов как указано на схеме работать будет только один оптрон в зависимости от полярности импульсов входящего сигнала Скорость/направление. Для увеличения помехозащищенности параллельно светодиодам можно подключить резисторы, увеличивающие ток, протекающий по проводу “Скорость/направление”.
Электрическая схема датчика скорости и направления оборотов
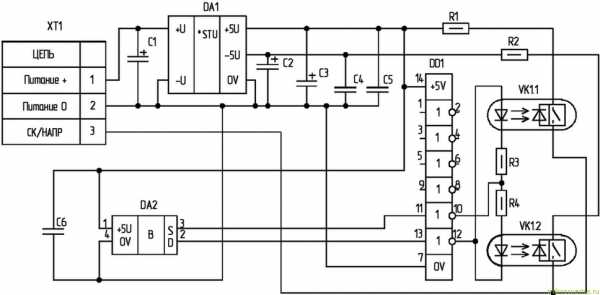
Рассмотренный порядок работы реализован в электрической схеме датчика скорости и направления вращения. Сигнал Направление поступает с выхода D микросхемы, использующей эффект Холла, DA2. Высокий логический уровень сигнала Направление преобразуется инвертором, входящим в состав микросхемы DD1, в низкий на выводе 12. Светодиод оптрона VK1.2 получает возможность работать при появлении высокого логического уровня на выводе 10 микросхемы DD1. Одновременно с этим запрещается работа светодиода оптрона VK1.1, так как на анод светодиода подано напряжение низкого логического уровня. Таким образом, благодаря соединению светодиодов оптронов с логическим элементом как изображено на схеме сигнал Направление устанавливает, через какой из оптронов будет проходить сигнал, поступающий с вывода 10 микросхемы DD1. Сигнал скорости оборотов поступает с выхода S микросхемы DA2 на вход инвертора микросхемы DD1. Высокий уровень импульсов, поступающих с вывода 10 микросхемы DD1, заставляет течь ток через резистор R4 и светодиод оптрона VK1.2. Функции оптронов разделяются следующим образом: оптрон VK1.1 формирует сигнал положительной полярности на контакте 3 клеммы XT1, оптрон VK1.2 – отрицательной. В схему датчика входит источник питания, преобразующий однополярное напряжение питания в двухполярное питание схемы. Конденсаторы, входящие в схему датчика, сглаживают помехи, уменьшая их влияние на формирование выходного сигнала. Резисторы R1, R2 задают выходной ток нашего импульсного датчика. Их номинал может быть переопределен в зависимости от входной цепи приёмника для их согласования. Схема использует один сдвоенный оптрон VK1, что позволяет сократить площадь печатной платы и сформировать сигналы Скорость и Направление вращения, используя один компонент.
Радиодетали в схеме
Параметры импульсного датчика во многом обуславливают примененные компоненты его электрической схемы. Диапазон изменения напряжения питания, при котором способен работать датчик скорости и направления вращения обуславливает преобразователь напряжения DA1. Верхний предел измерения скорости вращения зависит от быстродействия оптрона VK1. Применение конденсаторов с наименьшим тангенсом угла потерь сочетание конденсаторов с различными типами диэлектрика использование последних разработок в области конденсаторов позволяет добиться наиболее высоких результатов. При чрезмерном увеличении емкости существует опасность “перегрузить” преобразователь напряжения DA1, что приведет к срабатыванию защиты по току в момент подачи питания и схема “не будет подавать признаков жизни”. При выборе типа оптореле VK1 оценивается его быстродействие и частота импульсов, поступающих на вход оптореле. Правильный выбор VK1 позволит уменьшить стоимость датчика. Микросхема DD1 выполняет функцию простейшего усилителя по току и может быть заменена другой микросхемой. Клемма XT1 предназначенная для монтажа на печатную плату, может быть заменена на другой элемент разъемного соединения.
C1…C3 Конденсатор EMR 47 мкФ 50 В ф. Hitano
C4…C6 Конденсатор SMD 0805 2,2 мкФ 16 В
DA1 Преобразователь напряжения TMR 3-1221WI ф. Traco power
DA2 Микросхема SS526DT ф. Honeywell
DD1 Микросхема КР1533ЛН1
R1, R2 Резистор 300 Ом ±5%
R3, R4 Резистор 180 Ом ±5%
VK1 Оптореле 249КП10АР
ХТ1 Клемма LMI 107 203 51
Модифицирование импульсного датчика в зависимости от скорости вращения
Для различных применений требуется измерять различные диапазоны изменения скорости вращения, меняются требования к скорости определения смены направления вращения. Возможно применение датчика для скоростей 1 оборот в минуту и менее. При таких скоростях нужно увеличивать количество магнитов на диске, применять магниты с наименьшими габаритами и уменьшать зазор между микросхемой DA2 и плоскостью диска. Если скорости 5000 и более оборотов в минуту количество магнитов можно уменьшить. При этом наибольшая измеряемая скорость ограничена только конструктивными особенностями датчика. При уменьшении количества магнитов уменьшаются требования к наивысшей рабочей частоте компонентов схемы.
Источник: http://mikrocxema.ru/
Датчик Холла
Есть такой интересный эффект — если через квадратную проводящую пластину гнать постоянный ток, а саму пластину пронизать магнитным полем, чтобы линии индукции проходили через ее сечение, то летящие по пластине электроны отклоняются силой Лоуренса.
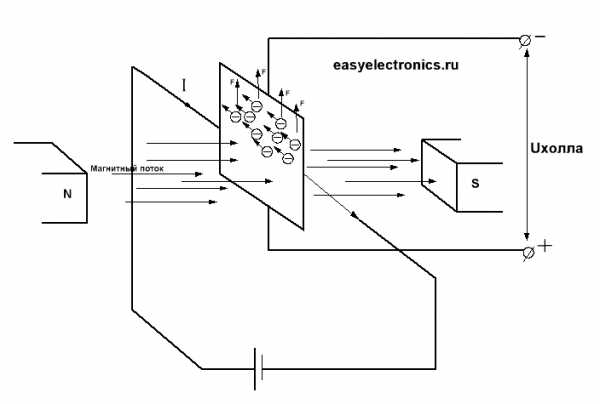 |
А раз так, то с одного края электронов будет больше чем с другой. Возникает разность потенциалов, то есть напряжение. И чем больше ток и сильней поле, тем большая разность будет. Это и есть эффект Холла.
Дальше дело за малым — берем источник стабильного тока, чем стабильней тем лучше, ведь от стабильности зависит точность показаний. Прогоняем постоянный ток по пластине, ловим да усиливаем разность потенциалов до осязаемых величин. В результате получаем отличную вещь — датчик магнитного поля, он же датчик Холла. Например такой:
 |
Моделей существует целая прорва. В чистом виде, правда, встречается редко. Обычно элемент Холла с чем нибудь да совмещен. Либо, как тут, с усилителем, либо с силовыми ключами, как в датчиках из компьютерных бесколлекторных вентиляторов — там он сразу же коммутирует обмотки, выполняя роль электронного коллектора. Правда на некоторых старых моделях вентиляторов можно обнаружить и целые микросборки из «чистого» датчика, усилителя и силовых ключей, но вот уже лет 5 мне такие не попадались.
Делал я тут один частный заказик недавно, вот там и применил эти козявки.
 |
Подключение проще простого — подал питание, снял сигнал. Питание по даташиту написано двуполярное, но ничего не мешает подать и однополярное. Просто в этом случае ноль сигнала у нас будет не 0В а Vcc/2. У меня на Pinboard напряжение в магистрали питания около 4.8 вольт, поэтому на выходе датчика 2.4 вольта в подвешенном состоянии.
Теперь берем и подносим к нашему датчику магнитик. В зависимости от полярности стороны магнита, напруга либо обвалится в ноль, либо подскочит до максимума. Ну и, в зависимости от расстояния, может принимать промежуточные значения, линейно завися от силы магнитного поля.
Это все интересно, но что с того? Куда это можно применить? А применений датчику можно придумать вагон и маленькую тележку. Например, бесконтактные концевые выключатели.
Причем, в отличии от герконов, датчики эти почти вечные — там нет ни единой движущейся части.
А если совместить датчик с магнитом и подсунуть ему шестеренку, что будет замыкать через себя магнитный поток, то можно легко получить датчик скорости вращения. Когда зубец будет ближе к датчику, то сопротивление магнитному потоку будет ниже, а значит и его сила будет больше. А на межзубцовых промежутках все наоборот. В результате, на выходе датчика будут импульсы сходные с формой зубов шестерни, а уж посчитать их не составит труда.
Или, например, надо нам замерить БОООЛЬШОЙ постоянный ток. Скажем идущий к драйверу двигателя. С малыми токами все ясно и так — ставим шунт и снимаем с него падение напряжения. С большими токами финт прокатит плохо — шунт будет лишней нагрузкой, сжирающей мощность, греющейся. Да и сделай его еще из подручных средств… А ведь можно сделать все куда проще. Заворачиваем провод в катушку, опоясываем магнитопроводом, а в разрез пихаем наш датчик. Причем необязательно делать много витков — если ток большой, да датчик чувствительный, то и одного-двух витков хватит (кстати, есть и неплохие промышленные датчики постоянного тока — LEM делает).
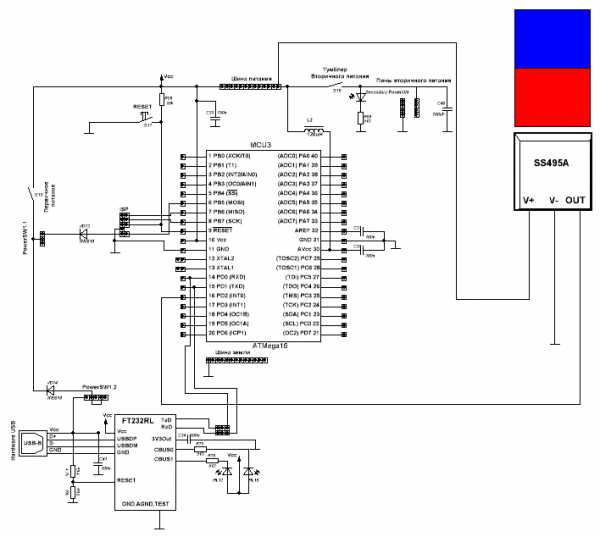
Ну и вот такой практический примерчик — на базе датчика SS495A сварганил простейший цифровой тахометр :) Сам датчик купил на Алиэспрессе
А схему собрал на своей демоплате:
 |
Получилась такая вот конструкция:
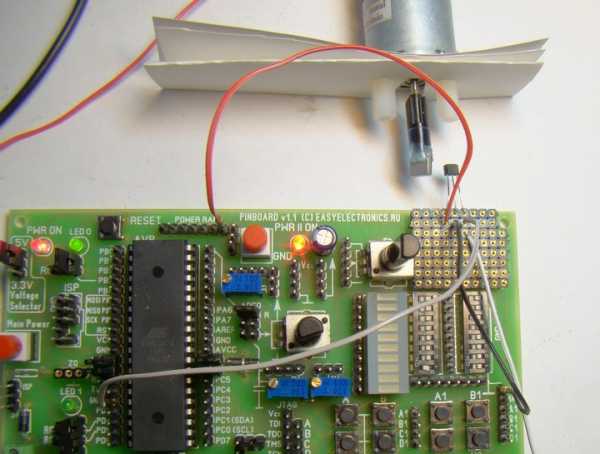 |
Включил моторчик, магнитик завертелся, а на выходе датчика Холла пошла вот такая вот картина:
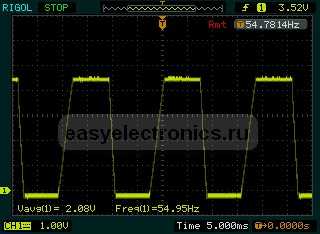 |
Вообще я сам удивился насколько четкие и резкие фронты. Я думал будет подобие синуса. Ан нет, магнит оказался мощный (ниодимовый из лазерной головки CD-ROM’a) и видимо он сразу же зашкаливает наш датчик.
Дальше, на базе ядра диспетчера, описанного в не так давно, набросал по быстрому программку (только функциональная часть):
HAL.c
| 1 2 3 4 5 6 7 8 9 10 11 12 13 | inline void InitAll(void) { //InitUSART UBRRL = LO(bauddivider); UBRRH = HI(bauddivider); UCSRA = 0; UCSRB = 1
"Питер - АТ"
Новости
|












