Принцип работы системы
Полный привод: принцип работы, системы и технологии
Если еще полтора десятка лет назад обладатель полноприводного автомобиля считался практически безоговорочным покорителем дорог, то в последнее время, рассуждая на тему полного привода машины, автолюбители, как правило, используют уточняющую формулировку, говоря о «полноценном полном приводе».
Любой автолюбитель скажет, что для штурма заваленного снегом двора, либо при преодолении размытой дождями грунтовки до дачи идеальным вариантом будет автомобиль, обладающий колесной формулой 4х4. Да и при езде по асфальтовой дороге в скользкую дождливую осеннюю пору гораздо более уверенно будет себя чувствовать водитель, находящийся за рулем полноприводной машины. Однако уже через несколько метров после того, как заснеженный участок дороги будет преодолен, либо автомобиль выберется с разбитой грунтовки на асфальтовую дорогу, дополнительная ведущая ось будет являться только лишь причиной серьезного перерасхода топлива.
Плюсы полноприводных автомобилей очевидны — такие машины менее чувствительны и прихотливы к качеству покрытия под колесами, при съезде с дороги с твердым покрытием полноприводный автомобиль сможет уверенно доставить водителя и пассажиров до места назначения, а на мокром или обледенелом шоссе такая машина сохранит достойную динамику и управляемость.
Пытаясь сохранить преимущества полного привода без ухудшения показателя топливной экономичности автомобиля, большинство современных автопроизводителей прибегают к помощи электронных систем, работающих вкупе с многодисковыми муфтами, способными подключать вторую колесную ось в автоматическом режиме только в случае возникшей необходимости. Классификация систем полного привода Среди специалистов принято различать три разновидности систем полного привода:
Неотключаемый постоянный (full-time или 4WD); Подключаемый посредством электроники (torque on-demand или AWD); Кроме того, существуют полноприводные системы с возможностью ручного подключения (part-time).
Полноприводной трансмиссией, которая первой стала массово устанавливаемой на серийно выпускаемых машинах, считается система part-time. Подобная система являет собой устройство, жестко подключающее передний мост. В результате, колеса обеих осей вынуждены вращаться с одинаковой скоростью. Естественно, что об установке межосевого дифференциала в данном случае речь не идет. Дифференциал — что это такое? Рассматривая такое устройство, как дифференциал, следует иметь в виду, что это специальное механическое приспособление, принимающее тягу с вала привода и распределяющее его в необходимой пропорции по ведущим колесам. При этом различие скорости вращения колес компенсируется автоматически. Таким образом, посредством дифференциала происходит направление крутящего момента к ведущим колесам, и при этом сами колеса будут обладать различной (дифференцированной) угловой скоростью.
Дифференциалы могут применяться для обоих мостов транспортного средства, оборудуемого полноприводной трансмиссией. Отдельные модели оснащаются дифференциалом, который монтируется в раздаточную коробку — подобное решение полного привода принято классифицировать как системы «full-time».
Чтобы понять, для чего автомобилю необходим дифференциал, стоит разобраться в принципе его работы. Все дело в том, что колеса любого автомобиля обладают одинаковой скоростью вращения только при его передвижении в прямом направлении. Как только машина начинает входить в вираж, каждое из четырех колес обретает индивидуальную скорость, при том, что и обе оси начинают «соревноваться» в скорости между собой. Объяснением этому явлению будет возникновение своей траектории для каждого из колес — те, что находятся внутри поворота, проходят меньший путь по сравнению с наружными колесом.
Таким образом, не будь дифференциала, в повороте внутреннее колесо проворачивалось бы на месте, для компенсации вращения наружного колеса. В таких условиях езда на большой скорости была бы невозможна, не приходилось бы говорить и об управляемости автомобиля. Наличие дифференциала дает возможность осям нужным образом «обгонять» друг друга при возникновении разницы скоростей движения колес.
Устройство межколесного дифференциала — при вхождении в поворот он позволяет внутреннему колесу крутиться медленнее Система part-time Система part-time конструируется без установки межосевого дифференциала. Такое устройство предполагает передачу момента от работающего двигателя на обе оси в одинаковом количестве — таким образом, обе оси крутятся с равной скоростью. Очевидно, что автомобилям, оборудованным системой привода part-time, передвижение по дорогам с хорошим асфальтовым или бетонным покрытием противопоказано, ведь пытаясь совершить поворот, водитель провоцирует возникновение вышеописанной разницы в протяженности пути мостов.
Поскольку момент по осям передается в соотношении 50 на 50, при повороте руля будет возникать проскальзывание колес какой-либо из осей. Если под колесами автомобиля снег, грязь или песок (что часто бывает при поездках на дачу, пикник или рыбалку), то небольшое сцепление колес и дорожного покрытия практически не причинит какого либо вреда автомобилю. А вот в случае совершении маневров на сухой и твердой поверхности дороги, возникающее проскальзывание негативным образом сказывается на функционировании трансмиссии, вызывает ускоренный износ покрышек, а также снижает качество управляемости автомобиля.
Таким образом, автомобили, оборудованные системой подключаемого полного привода, хороши для регулярной их эксплуатации в условиях плохих дорог или для покорения бездорожья. В этом случае, как правило, не требуются блокировки, поскольку один мост изначально будет жестко подключенным.
Другими плюсами полноприводного решения part-time называют относительную надежность и простоту всей конструкции: здесь отсутствуют электрические либо механические приводы, не используются блокировки, не применяются дифференциалы. Упрощает систему и то, что в ней нет дополнительных гидравлических или пневматических элементов. Однако для повседневной эксплуатации такая система неудобна. Использование постоянно включенной оси передних колес чревато поломкой автомобиля, а постоянно включать и отключать мост попросту неудобно. В перечень моделей машин, конструкция которых предусматривает использование part-time, входят следующие марки и модели транспортных средств: Nissan Patrol первых поколений, Toyota Land Cruiser 70, пикап Mazda BT-50, Suzuki Jimny, Nissan NP300, Jeep Wrangler и отечественный УАЗ. Постоянный полный приводПеречисленные особенности и недостатки системы подключаемого полного привода обусловили разработку постоянно подключенной полноприводной системы, избавленной от подобных проблем. В результате свет увидели автомобили с приводом «4WD», у которых роль ведущих выполняют все имеющиеся колеса, а также имеется свободный межосевой дифференциал, позволяющий выпускать «ненужную» мощность благодаря проскальзыванию одного из редукторных сателлитов. Таким образом, автомобиль всегда передвигается со всеми ведущими колесами.
Нюансом механизма 4WD является следующая его особенность. При пробуксовке какого либо колеса, межколесный дифференциал отключает второе колесо этой оси. Подобным образом работает и вторая пара колес. Вполне возможна ситуация, когда автомобиль с системой привода 4WD, забуксовав одновременно колесами обеих осей, полностью обездвиживается. Чтобы минимизировать падение внедорожных свойств полноприводных автомобилей с системой 4WD, разработчики устанавливают хотя бы одну блокировку принудительного типа. Как правило, принудительно блокируется межосевой дифференциал.
В качестве дополнительной опции нередко предлагают установку блокировки переднего дифференциала. К моделям машин с системой 4WD относятся такие внедорожники, как: Land Cruiser 100 Prado и Land Cruiser 100, Land Rover Defender и Land Rover Discovery. Но, пожалуй, самой известной моделью, оборудованной приводом 4WD, является Лада Нива.Несмотря на все свои преимущества, система постоянно подключенного полного привода, к сожалению, обладает определенными минусами. Так, по уровню управляемости на асфальтовых и других твердых дорогах внедорожники с обеими ведущим осями довольно далеки от идеала. В критических ситуациях такой автомобиль будет пытаться соскальзывать из поворота, не реагируя на вращение руля и нажатие педали газы должным образом. Подключаемый полный привод (автоматический) Современный формат кроссоверов, вне зависимости от размера автомобиля, предполагает возможность быстрого и кратковременного подключения дополнительной пары ведущих колес. Естественно, что такие подключения должны производиться в автоматическом режиме, без участия водителя. Для реализации подобных решений автомобильные конструкторы стали применять специальные многодисковые муфты, по необходимости подключающие колеса задней оси в дополнение к постоянно вращающимся передним колесам.
Реализованная таким образом полноприводная система значительно проще классических внедорожных конструкций. Здесь отсутствует раздаточная коробка, а около переднего дифференциала предусмотрена только пара шестерен для отбора мощности и выходной вал.
Впоследствии разработчики придумали использовать межосевые дифференциалы, оснащаемые в дополнение к принудительной блокировке еще и самоблокирующимися механизмами. Используя различные решения (вискомуфту или дифференциал Torsen), разработчики стремились к единой общей цели — частичному заблокированию межосевого дифференциала в целях повышения управляемости автомобиля — при возникновении пробуксовки какой-либо из осей, срабатываемая блокировка не позволяла дифференциалу выключать вторую пару колес и момент от двигателя продолжал к ним поступать. Автомобили с представленным вариантом полного привода маркируются аббревиатурой AWD.
Дифференциал Торсен
Однако, между собой муфты также существенно различаются вне зависимости от схожести принципа подключения колес второй оси. Одними из первых муфты стали применять инженеры концерна Volkswagen для своих хэтчбеков Golf. Речь идет о фирменной трансмиссии Syncro, где установленные фрикционы не сжимались, а работали в силиконовой жидкости, густеющей в условиях повышения нагрузки и способной самостоятельно передавать вращение. Представленная вискомуфта являлась неуправляемой и была не способна передавать все 100% момента к задней оси. Кроме того, даже при довольно непродолжительных пробуксовках силикон закипал, что вело к перегреванию и последующему сгоранию муфты.Вискомуфта (вязкостная муфта)
Более продвинутая конструкция использовалась на ранних моделях Ford Escape. Здесь уже применялись муфты, сжимающиеся посредством работы клиновидных прорезей и шариков. Эти муфты хотя и работали намного четче, зато могли вызывать весьма резкие и чувствительные удары в момент поворота. Муфта Haldex Своеобразной революцией среди муфт, используемых в системах полного привода, называют появление в конце 90-х годов прошлого века первого поколения муфты Haldex. В таком устройстве диски сжимались при помощи гидроцилиндра с насосом для выработки давления масла. Насос монтировался на одной из половин муфты, привод к нему него подходил от другой половины. Теперь в случае возникновения разницы в скорости вращения колес передней и задней осей давление сжатия увеличивалось, а муфта блокировалась. В сравнении с ранее устанавливаемыми образцами муфт, Haldex работал очень мягко и обрел серьезный успех.https://youtu.be/frDhmqBj0es
Стоит иметь в виду, что современные технологии и используемые материалы дали возможность изготовить по-настоящему высокотехнологичную муфту, которую можно держать в частично подключенном состоянии без опасений перегрева. Тем самым производителям удалось распределить крутящий момент передаваемый на пары колес в пользу задней оси, обеспечив автомобилю «классическую» управляемость и полноприводные возможности. Принимая во внимание гибкость используемых алгоритмов работы и весьма глубокую степень проработки конструкции используемых многодисковых муфт, в современный период времени это самое востребованное решение организации полноприводной трансмиссии, которую вряд ли что-то заменит в ближайшие несколько лет.
Принцип работы впускной системы
Работа впускной системы основана на разности давлений в цилиндре двигателя и атмосфере, возникающей на такте впуска. Объем поступающего воздуха при этом пропорционален объему цилиндра. Величина поступающего воздуха регулируется положением дроссельной заслонкив зависмости от режима работы двигателя.
На двигателях с непосредственным впрыском топлива в дополнение к дроссельной заслонке работают впускные заслонки. Совместная работа дроссельной и впускных заслонок обеспечивает несколько видов смесеобразования:
послойное смесеобразование;
бедное гомогенное смесеобразование;
стехиометрическое гомогенное смесеобразование.
Послойное смесеобразованиеиспользуется при работе двигателя на малых и средних оборотах и нагрузках. При послойном смесеобразовании дроссельная заслонка большую часть времени открыта полностью. Заслонка прикрывается только для обеспечения разряжения, необходимого в работе системы улавливания паров бензина (продувка адсорбера), системы рециркуляции отработавших газов (перепуск отработавших газов во впускной коллектор) и вакуумного усилителя тормозов (создание необходимого разрежения). Впускные заслонки закрыты.
Стехиометрическое(легковоспламеняемое)гомогенное(однородное)смесеобразованиеприменяется при высоких оборотах двигателя и больших нагрузках. Дроссельная заслонка открывается в соответствии с требуемым крутящим моментом. Впускные заслонки открыты.
На бедной гомогенной смесидвигатель работает в промежуточных режимах. Дроссельная заслонка открывается также в соответствии с требуемым крутящим моментом. Впускные заслонки закрыты.
Cистема изменения фаз газораспределения (общепринятое международное название Variable Valve Timing, VVT) предназначена для регулирования параметров работы газораспределительного механизма в зависимости от режимов работы двигателя. Применение данной системы обеспечивает повышение мощности и крутящего момента двигателя, топливную экономичность и снижение вредных выбросов.
К регулируемым параметрам работы газораспределительного механизма относятся:
момент открытия (закрытия) клапанов;
продолжительность открытия клапанов;
высота подъема клапанов.
В совокупности эти параметры составляют фазы газораспределения – продолжительность тактов впуска и выпуска, выраженную углом поворота коленчатого вала относительно «мертвых» точек. Фаза газораспределения определяется формой кулачка распределительного вала, воздействующего на клапан.
На разных режимах работы двигателя требуется разная величина фаз газораспределения. Так, при низких оборотах двигателя фазы газораспределения должны иметь минимальную продолжительность («узкие» фазы). На высоких оборотах, наоборот, фазы газораспределения должны быть максимально широкими и при этом обеспечивать перекрытие тактов впуска и выпуска (естественную рециркуляцию отработавших газов).
Кулачок распределительного вала имеет определенную форму и не может одновременно обеспечить узкие и широкие фазы газораспределения. На практике форма кулачка представляет собой компромисс между высоким крутящим моментом на низких оборотах и высокой мощностью на высоких оборотах коленчатого вала. Это противоречие, как раз и разрешает система изменения фаз газораспределения.
В зависимости от регулируемых параметров работы газораспределительного механизма различают следующие способы изменяемых фаз газораспределения:
поворот распределительного вала;
применение кулачков с разным профилем;
изменение высоты подъема клапанов.
Наиболее распространенными являются системы изменения фаз газораспределения, использующие поворот распределительного вала:
VANOS (Double VANOS) от BMW;
VVT-i (Dual VVT-i), Variable Valve Timing with intelligence от Toyota;
VVT, Variable Valve Timing от Volkswagen;
VTC, Variable Timing Control от Honda;
CVVT, Continuous Variable Valve Timing от Hyundai, Kia, Volvo, General Motors;
VCP, Variable Cam Phases от Renault.
Принцип работы данных систем основан на повороте распределительного вала по ходу вращения, чем достигается раннее открытие клапанов по сравнению с исходным положением.
Система изменения фаз газораспределения данного типа имеет следующее общее устройство:
гидроуправляемая муфта;
система управления.
Схема системы автоматического изменения фаз газораспределения
Гидроуправляемая муфта (обиходное название фазовращатель) непосредственно осуществляет поворот распределительного вала. Муфта состоит из ротора, соединенного с распределительным валом, и корпуса, в роли которого выступает шкив привода распределительного вала. Между ротором и корпусом имеются полости, к которым по каналам подводится моторное масло. Заполнение той или иной полости маслом обеспечивает поворот ротора относительно корпуса и соответственно поворот распределительного вала на определенный угол.
В большинстве своем гидроуправляемая муфта устанавливается на распределительный вал впускных клапанов. Для расширения параметров регулирования в отдельных конструкциях муфты устанавливаются на впускной и выпускной распределительные валы.
Система управления обеспечивает автоматическое регулирование работы гидроуправляемой муфты. Конструктивно она включает входные датчики, электронный блок управления и исполнительные устройства. В работе системы управления используются датчики Холла, оценивающие положения распределительных валов, а также другие датчики системы управления двигателем: частоты вращения коленчатого вала, температуры охлаждающей жидкости, расходомер воздуха. Блок управления двигателем принимает сигналы от датчиков и формирует управляющие воздействия на исполнительное устройство – электрогидравлический распределитель. Распределитель представляет собой электромагнитный клапан и обеспечивает подвод масла к гидроуправляемой муфте и отвод от нее в зависимости от режимов работы двигателя.
Система изменения фаз газораспределения предусматривает работу, как правило, в следующих режимах:
холостой ход (минимальные обороты коленчатого вала);
максимальная мощность;
максимальный крутящий момент.
Другая разновидность системы изменения фаз газораспределения построена на применении кулачков различной формы, чем достигается ступенчатое изменение продолжительности открытия и высоты подъема клапанов. Известными такими системами являются:
VTEC, Variable Valve Timing and Lift Electronic Control от Honda;
VVTL-i, Variable Valve Timing and Lift with intelligence от Toyota;
MIVEC, Mitsubishi Innovative Valve timing Electronic Control от Mitsubishi;
Valvelift System от Audi.
Данные системы имеют, в основном, схожую конструкцию и принцип действия, за исключением Valvelift System. К примеру, одна из самых известных система VTEC включает:
набор кулачков различного профиля;
систему управления.
Схема системы VTEC
Распределительный вал имеет два малых и один большой кулачок. Малые кулачки через соответствующие коромысла (рокеры) соединены с парой впускных клапанов. Большой кулачок перемещает свободное коромысло.
Система управления обеспечивает переключение с одного режима работы на другой путем срабатывания блокирующего механизма. Блокирующий механизм имеет гидравлический привод. При низких оборотах двигателя (малой нагрузке) работа впускных клапанов производится от малых кулачков, при этом фазы газораспределения характеризуются малой продолжительностью. При достижении оборотов двигателя определенного значение система управления приводит в действие блокирующий механизм. Коромысла малых и большого кулачков соединяются с помощью стопорного штифта в одно целое, при этом усилие на впускные клапаны передается от большого кулачка.
Другая модификация системы VTEC имеет три режима регулирования, определяемые работой одного малого кулачка (открытие одного впускного клапана, малые обороты двигателя), двух малых кулачков (открытие двух впускных клапанов, средние обороты), а также большого кулачка (высокие обороты).
Современной системой изменения фаз газораспределения от Honda является система I-VTEC, объединяющая системы VTEC и VTC. Данная комбинация существенным образом расширяет параметры регулирования двигателя.
Наиболее совершенная с конструктивной точки зрения разновидность системы изменения фаз газораспределения основана на регулировании высоты подъема клапанов. Данная система позволяет отказаться от дроссельной заслонки на большинстве режимов работы двигателя. Пионером в этой области является компания BMW и ее система Valvetronic. Аналогичный принцип использован и в других системах:
Valvematic от Toyota;
VEL, Variable Valve Event and Lift System от Nissan;
MultiAir от Fiat;
VTI, Variable Valve and Timing Injection от Peugeot.
Схема системы Valvetronic
В системе Valvetronic изменение высоты подъема клапанов обеспечивает сложная кинематическая схема, в которой традиционная связь кулачок-коромысло-клапан дополнена эксцентриковым валом и промежуточным рычагом. Эксцентриковый вал получает вращение от электродвигателя через червячную передачу. Вращение эксцентрикового вала изменяет положение промежуточного вала, который, в свою очередь, задает определенное движение коромысла и соответствующее ему перемещение клапана. Изменение высоты подъема клапана осуществляется непрерывно в зависимости от режимов работы двигателя.
Система Valvetronic устанавливается только на впускные клапаны.
Принцип работы системы gps
В основе работы системы GPS лежит:
спутниковая трилатерация (на ней базируется работа системы);
спутниковая дальнометрия (измерение расстояний до спутников);
точная временная привязка (высокоточная синхронизация отсчета времени в системе спутники-приемники);
точное положение спутников в космосе;
коррекция ошибок, вносимых задержкой радиосигнала спутника в ионосфере и тропосфере.
Спутниковая трилатерация предполагает, что точные координаты любой точки на поверхности Земли могут быть вычислены путем измерений расстояний от группы спутников, если их положение в космосе известно.
В этом случае спутники являются пунктами с известными координатами. Предположим, что расстояние от одного спутника известно, и вокруг него можно описать сферу заданного радиуса. Если известно также расстояние до второго спутника, то определяемое местоположение будет расположено где-то в круге, задаваемом пересечением двух сфер. Третий спутник определяет две точки на окружности. Четвертый спутник позволяет окончательно точно определить местоположение точки. Таким образом, зная расстояние до четырех спутников, можно вычислить координаты определяемой точки (рис. 1).
Расстояние до спутников определяется по измерениям времени прохождения радиосигнала от космического аппарата до приемника, умноженным на скорость света. Для того чтобы определить время распространения сигнала, нам необходимо знать, когда он был передан со спутника. Для этого на спутнике и в приемнике одновременно генерируется одинаковый псевдослучайный код. Каждый спутник системы GPS передает два радиосигнала: на частоте L1=1575,42 МГц и L2=1227,60 МГц. Сигнал L1 имеет два дальномерных кода с псевдослучайным шумом (PRN), P-код и C/A-код. «Точный», или P-код, может быть зашифрован для военных целей. «Грубый», или C/A-код, не зашифрован. Сигнал частоты L2 модулируется только с P-кодом.[3]
Большинство гражданских пользователей при работе с GPS-системами используют C/A-код. Некоторые приемники Trimble, применяемые в геодезии, работают с P-кодом. Приемник проверяет входящий сигнал со спутника и определяет, когда он сам генерировал такой же код. Полученная разница, умноженная на скорость света, и дает искомое расстояние. Использование кода позволяет приемнику определить временную задержку в любое время. Кроме того, спутники могут излучать сигнал на одной и той же частоте, так как каждый спутник идентифицируется по своему PRN.
Как видно из вышесказанного, вычисления напрямую зависят от точности хода часов на спутниках и в приемниках. Код должен генерироваться на спутнике и в приемнике строго в одно и то же время. На спутниках установлены атомные часы, имеющие точность около одной наносекунды. Однако это решение является слишком дорогим, чтобы использовать его в приемниках GPS. Поэтому для устранения ошибок хода часов приемника используются результаты измерения сигналов от четвертого спутника. Их можно использовать для устранения ошибок, которые возникают, если часы на спутнике и в приемнике не синхронизированы (рис 2).
24 рабочих спутника системы Navstar расположены на высоте примерно 20 200 км от поверхности Земли с орбитальным периодом в 12 часов. В шести различных плоскостях, имеющих наклон к экватору в 55°, расположено по 4 спутника. Указанная высота необходима для обеспечения стабильности орбитального движения спутников и уменьшения фактора влияния атмосферы.
Некоторые источники ошибок, возникающих при работе GPS, являются трудноустранимыми. Вычисления предполагают, что сигнал распространяется с непрерывной скоростью, которая равна скорости света. Однако на практике все обстоит гораздо сложнее. Скорость света является константой только в вакууме. Когда сигнал проходит через ионосферу и тропосферу, скорость его распространения уменьшается, что приводит к ошибкам в измерении дальности. В современных GPS-приемниках используют всевозможные алгоритмы устранения этих задержек. Иногда возникают ошибки хода атомных часов и отклонения орбит спутников, но они обычно незначительны и тщательно отслеживаются станциями слежения. Многолучевая интерференция также вносит ошибки в определение местоположения с помощью GPS приемника. Это происходит, когда сигнал отражается от объектов, расположенных на земной поверхности, что создает заметную интерференцию с сигналами, приходящими непосредственно со спутников. Специальная техника обработки сигнала и продуманная конструкция антенн позволяет свести к минимуму этот источник ошибок.
Принципы спутниковой навигации
Космический сегмент, состоящий из навигационных спутников, представляет собой совокупность источников радионавигационных сигналов, передающих одновременно значительный объем служебной информации. Основные функции каждого спутника - формирование и излучение радиосигналов, необходимых для навигационных определений потребителей и контроля бортовых систем спутника.
В состав наземного сегмента входят космодром, командно-измерительный комплекс и центр управления. Космодром обеспечивает вывод спутников на требуемые орбиты при первоначальном развертывании навигационной системы, а также периодическое восполнение спутников по мере их выхода из строя или выработки ресурса. Главными объектами космодрома являются техническая позиция и стартовый комплекс. Техническая позиция обеспечивает прием, хранение и сборку ракет-носителей и спутников, их испытания, заправку и состыковку. В число задач стартового комплекса входят: доставка носителя с навигационным спутником на стартовую площадку, установка на пусковую систему, предполетные испытания, заправка носителя, наведение и пуск.
Командно-измерительный комплекс служит для снабжения навигационных спутников служебной информацией, необходимой для проведения навигационных сеансов, а также для контроля и управления ими как космическими аппаратами.
Центр управления, связанный информационными и управляющими радиолиниями с космодромом и командно-измерительным комплексом, координирует функционирование всех элементов спутниковой навигационной системы.
Пользовательский сегмент
В пользовательский сегмент входит аппаратура потребителей. Она предназначается для приема сигналов от навигационных спутников, измерения навигационных параметров и обработки измерений. Для решения навигационных задач в аппаратуре потребителя предусматривается специализированный встроенный компьютер. Разнообразие существующей аппаратуры потребителей обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
Современная спутниковая навигация основывается на использовании принципа беззапросных дальномерных измерений между навигационными спутниками и потребителем. Это означает, что потребителю передается в составе навигационного сигнала информация о координатах спутников. Одновременно (синхронно) производятся измерения дальностей до навигационных спутников. Способ измерений дальностей основывается на вычислении временных задержек принимаемого сигнала от спутника по сравнению с сигналом, генерируемым аппаратурой потребителя.
На рисунке приведена схема определений местоположения потребителя с координатами x, y, z на основе измерений дальности до четырех навигационных спутников. Цветными яркими линиями показаны окружности, в центре которых расположены спутники. Радиусы окружностей соответствуют истинным дальностям, т.е. истинным расстояниям между спутниками и потребителем. Цветные неяркие линии – это окружности с радиусами, соответствующими измеренным дальностям, которые отличаются от истинных и поэтому называются псевдодальностями. Истинная дальность отличается от псевдодальности на величину, равную произведению скорости света на уход часов b, т.е. величину смещения часов потребителя по отношению к системному времени. На рисунке показан случай, когда уход часов потребителя больше нуля – то есть часы потребителя опережают системное время, поэтому измеренные псевдодальности меньше истинных дальностей.
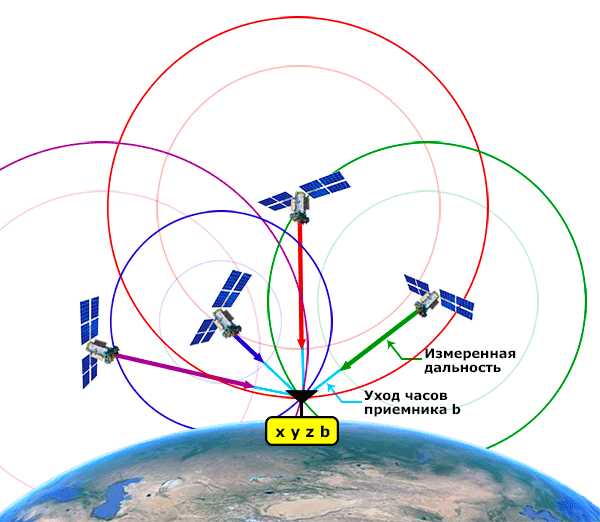
В идеальном варианте, когда измерения производятся точно и показания часов спутников и потребителя совпадают для определения положения потребителя в пространстве достаточно произвести измерения до трех навигационных спутников.
В действительности показания часов, которые входят в состав навигационной аппаратуры потребителя, отличаются от показаний часов на борту навигационных спутников. Тогда для решения навигационной задачи к неизвестным ранее параметрам (три координаты потребителя) следует добавить еще один - смещение между часами потребителя и системным временем. Отсюда следует, что в общем случае для решения навигационной задачи потребитель должен «видеть», как минимум, четыре навигационных спутника.
Для функционирования навигационных спутниковых систем необходимы данные о параметрах вращения Земли, фундаментальные эфемериды Луны и планет, данные о гравитационном поле Земли, о моделях атмосферы, а также высокоточные данные об используемых системах координат и времени.
Геоцентрические системы координат - системы координат, начало которых совпадает с центром масс Земли. Их также называют общеземными или глобальными.
Для построения и поддержания общеземных систем координат используются четыре основных метода космической геодезии:
- радиоинтерферометрия со сверхдлинной базой (РСДБ),
- лазерная локация космических аппаратов (SLR),
- доплеровские измерительные системы (DORIS),
- навигационные измерения космических аппаратов ГЛОНАСС и других ГНСС.
Международная земная система координат ITRF является эталоном земной системы координат.
В современных навигационных спутниковых системах используются различные, как правило национальные, системы координат.
| Система координат ГЛОНАСС | ПЗ-90 (Параметры Земли 1990 года) |
| Система координат GPS | WGS-84 (World Geodetic System) |
| Система координат ГАЛИЛЕО | GTRF (Galileo Terrestrial Referenfce Frame) |
| Система координат БЕЙДОУ | CGCS2000 (China Geodetic Coordinate System 2000) |
| Система координат QZSS | JGS (Japanese geodetic system) |
| Система координат NavIC | WGS-84 (World Geodetic System) |
В соответствии с решаемыми задачами применяются два типа систем времени: астрономические и атомные.
Системы астрономического времени основаны на суточном вращении Земли. Эталоном для построения шкал астрономического времени служат солнечные или звездные сутки, в зависимости от точки небесной сферы, по которой производится измерение времени.
Всемирное время UT (Universal Time) – это среднее солнечное время на гринвическом меридиане.
Всемирное координированное время UTC синхронизировано с атомным временем и является международным стандартом, на котором базируется гражданское время.
Атомное время (TAI) — время, в основу измерения которого положены электромагнитные колебания, излучаемые атомами или молекулами при переходе из одного энергетического состояния в другое. В 1967 году на Генеральной конференции мер и весов атомная секунда представляет собой переход между сверхтонкими уровнями F=4, M=0 и F=3, M=0 основного состояния 2S1/2 атома цезия-133, не возмущённого внешними полями, и что частоте этого перехода приписывается значение 9 192 631 770 Герц.
Спутниковая радионавигационная система является пространственно-временной системой с зоной действия, охватывающей всё околоземное пространство, и функционирует в собственном системном времени. Важное место в ГНСС отводится проблеме временной синхронизации подсистем. Временная синхронизация важна и для обеспечения заданной последовательности излучения сигналов всех навигационных спутников. Она обусловливает возможность применения пассивных дальномерных (псевдодальномерных) методов измерений. Наземный командно-измерительный комплекс обеспечивает синхронизацию шкал времени всех навигационных КА путем их сверки и коррекции (непосредственной и алгоритмической).
Навигационных радиосигналы
При выборе типов и параметров сигналов, используемых в спутниковых радионавигационных системах, учитывается целый комплекс требований и условий. Сигналы должны обеспечивать высокую точность измерения времени прихода (задержки) сигнала и его доплеровской частоты и высокую вероятность правильного декодирования навигационного сообщения. Также сигналы должны иметь низкий уровень взаимной корреляции для того, чтобы сигналы разных навигационных космических аппаратов надежно различались навигационной аппаратурой потребителей. Кроме того, сигналы ГНСС должны максимально эффективно использовать отведенную полосу частот при малом уровне внеполосного излучения, обладать высокой помехоустойчивостью.
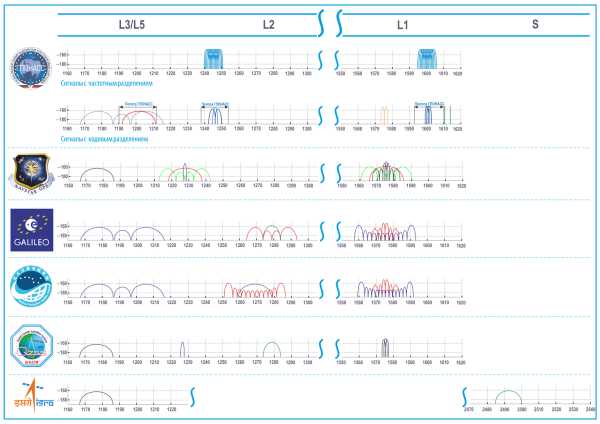
Почти все существующие навигационные спутниковые системы, за исключением индийской системы NAVIC, используют для передачи сигналов диапазон L. Система NAVIC будет излучать сигналы дополнительно и в S диапазоне.
Диапазоны, занимаемые различными навигационными спутниковыми системами
Виды модуляции
По мере развития спутниковых навигационных систем изменялись используемые виды модуляции радиосигналов. В большинстве навигационных систем изначально использовались исключительно сигналы с бинарной (двухпозиционной) фазовой модуляцией – ФМ-2 (BPSK). В настоящее время в спутниковой навигации начался переход к новому классу модулирующих функций, получивших название BOC (Binary Offset Carrier)-сигналов.
Принципиальное отличие BOC-сигналов от сигналов с ФМ-2 состоит в том, что символ модулирующей ПСП BOC-сигнала представляет собой не прямоугольный видеоимпульс, а отрезок меандрового колебания, включающий в себя некоторое постоянное число периодов k. Поэтому сигналы с BOC-модуляцией часто называют меандровыми шумоподобными сигналами.
Использование сигналов с BOC-модуляцией повышает потенциальную точность измерения и разрешающую способность по задержке. Одновременно с этим, уменьшается уровень взаимных помех при совместном функционировании навигационных систем, использующих традиционные и новые сигналы.
Каждый спутник принимает с наземных станций управления навигационную информацию, которая передается обратно пользователям в составе навигационного сообщения. Навигационное сообщение содержит разные типы информации, необходимые для того, чтобы определить местоположение пользователя и синхронизовать его шкалу времени с национальным эталоном.
Типы информации навигационного сообщения
- Эфемеридная информация, необходимая для вычисления координат спутника с достаточной точностью
- Погрешность расхождения бортовой шкалы времени относительно системной шкалы времени для учета смещения времени космического аппарата при навигационных измерениях
- Расхождение между шкалой времени навигационной системы и национальной шкалой времени, для решения задачи синхронизации потребителей
- Признаки пригодности с информацией о состоянии спутника для оперативного исключения спутников с выявленными отказами из навигационного решения
- Альманах с информацией об орбитах и состоянии всех аппаратов в группировке для долгосрочного грубого прогноза движения спутников и планирования измерений
- Параметры модели ионосферы, необходимые одночастотным приемникам для компенсации погрешностей навигационных измерений, связанных с задержкой распространения сигналов в ионосфере
- Параметры вращения Земли для точного пересчета координат потребителя в разных системах координат
Признаки пригодности обновляются в течение нескольких секунд при обнаружении отказа. Параметры эфемерид и времени, как правило, обновляются не чаще, чем раз в полчаса. При этом период обновления для разных систем сильно отличается и может достигать четырех часов, в то время как альманах обновляется не чаще, чем раз в день.
По своему содержанию навигационное сообщение подразделяется на оперативную и неоперативную информацию и передается в виде потока цифровой информации (ЦИ). Изначально во всех навигационных спутниковых системах использовалась структура вида «суперкадр/кадр/строка/слово». При этой структуре поток ЦИ формируется в виде непрерывно повторяющихся суперкадров, суперкадр состоит из нескольких кадров, кадр состоит из нескольких строк. В соответствии со структурой «суперкадр/кадр/строка/слово» формировались сигналы системы БЕЙДОУ, ГАЛИЛЕО (кроме E6), GPS (LNAV данные, L1), сигналы ГЛОНАСС с частотным разделением. В зависимости от системы, размеры суперкадров, кадров и строк могут отличаться, но принцип формирования остается похожим.
Сейчас в большинстве сигналов используется гибкая строковая структура. В этой структуре навигационное сообщение формируется в виде переменного потока строк различных типов. Каждый тип строки имеет свою уникальную структуру и содержит определённый тип информации (указаны выше). НАП выделяет из потока очередную строку, определяет её тип и в соответствии с типом выделяет информацию, содержащуюся в этой строке.
Гибкая строковая структура навигационного сообщения позволяет значительно более эффективно использовать пропускную способность канала передачи данных. Но главным достоинством навигационного сообщения с гибкой строковой структурой является возможность её эволюционной модернизации при соблюдении принципа обратной совместимости. Для этого в ИКД для разработчиков НАП специально указывается, что если НАП в навигационном сообщении встречает строки неизвестных ей типов, то она должна их игнорировать. Это позволяет добавлять в процессе модернизации ГНСС к ранее существовавшим типам строк строки с новыми типами. НАП, выпущенная ранее, игнорирует строки с новыми типами и, следовательно, не использует те новации, которые вводятся в процессе модернизации ГНСС, но при этом её работоспособность не нарушается. Сообщения сигналов ГЛОНАСС с кодовым разделением имеют строковую структуру.
На точность определения потребителем своих координат, скорости движения и времени влияет множество факторов, которые можно разделить на категории:
- Системные погрешности, вносимые аппаратурой космического комплекса
Погрешности, связанные с функционированием бортовой аппаратуры спутника и наземного комплекса управления ГНСС обусловлены в основном несовершенством частотно-временного и эфемеридного обеспечения.
- Погрешности, возникающие на трассе распространения сигнала от космического аппарата до потребителя
Погрешности обусловлены отличием скорости распространения радиосигналов в атмосфере Земли от скорости их распространения в вакууме, а также зависимостью скорости от физических свойств различных слоёв атмосферы.
- Погрешности, возникающие в аппаратуре потребителя
Аппаратурные погрешности подразделяются на систематическую погрешность аппаратурной задержки радиосигнала в АП и флуктуационные погрешности, обусловленные шумами и динамикой потребителя.
Кроме того, на точность навигационно-временного определения существенно влияет взаимное расположение навигационных спутников и потребителя. Количественной характеристикой погрешности определения местоположения и поправки показаний часов, связанной с особенностями пространственного положения спутника и потребителя, служит так называемый геометрический фактор ΓΣ или коэффициент геометрии. В англоязычной литературе используется обозначение GDOP - Geometrical delusion of precision. Геометрический фактор ΓΣ показывает, во сколько раз происходит уменьшение точности измерений и зависит от следующих параметров:
- Гп - геометрический фактор точности определения местоположения потребителя ГНСС в пространстве.Соответствует PDOP - Position delusion of precision.
- Гг - геометрический фактор точности определения местоположения потребителя ГНСС по горизонтали.Соответствует HDOP - Horizontal delusion of precision.
- Гв - геометрический фактор точности определения местоположения потребителя ГНСС по вертикали.Соответствует VDOP - Vertical delusion of precision.
- Гт - геометрический фактор точности определения поправки показаний часов потребителя ГНСС.Соответствует TDOP - Time delusion of precision.







"Питер - АТ"
ИНН 780703320484
ОГРНИП 313784720500453
Новости
-
Отзывы о Питер-АТ
Спасибо нашим клиентам за отзывы о нас:
-
Акция на ремонт вариаторных трансмиссий

-
Замена масла в двигателе в подарок
При замене масла в АКПП замена масла в двигателе бесплатно! -
Клиенту на заметку
-
Контрактные АКПП в СПб
