Смещение датчиком холла
Интегральные малопотребляющие датчики положения на основе эффекта Холла
Компании Texas Instruments и Honeywell предлагают датчики Холла с ультрамалым энергопотреблением для компактных применений с автономным питанием. Имеются модели для определения фиксированного положения объекта и для измерения его движения. В чем же отличия датчиков TI и Honeywell, и какая модель лучше подойдет в том или ином случае?
Для передачи в электрическую схему информации о положении различных подвижных элементов, таких как валы, заслонки, крышки, роторы электродвигателей, в свое время были разработаны специализированные приборы, известные как датчики положения. Существуют датчики, основанные на электромеханическом, емкостном, индуктивном, ультразвуковом, магнитном или оптическом принципе работы, а также множество комбинированных устройств. Каждый тип датчиков обладает конкретными достоинствами и недостатками и имеет свою область применений. В последние десятилетия список типов датчиков положения пополнился еще одним типом – датчиками на основе эффекта Холла.
Отличительными характеристиками современной электроники являются компактность и экономичность. И если с компактностью у датчиков Холла особых проблем никогда не было, то с экономичностью до недавнего времени было непросто: в связи с появлением экономичных электронных приборов, позволяющих устройству несколько лет работать от одноэлементной литиевой батарейки, даже небольшой ток потребления обычного датчика Холла уже вносит ощутимый вклад в общее энергопотребление системы.
Поэтому в последнее время ведущие производители электронных компонентов, в том числе Texas Instruments и Honeywell, представили новый тип датчиков положения на основе эффекта Холла, отличающийся повышенной экономичностью. Ключевой особенностью этих микросхем является ультрамалый ток собственного потребления, который в совокупности с компактными размерами и высокой чувствительностью делает их идеальными для компактных приложений с батарейным питанием, например, для беспроводных датчиков охранных систем, устройств интернета вещей и других систем.
Особенности малопотребляющих дискретных датчиков Холла
Различают линейные и дискретные датчики Холла (рисунок 1). Выходные сигналы линейных датчиков пропорциональны величине магнитной индукции. Основная сфера применения подобных устройств – измерители напряженности магнитного поля, датчики постоянных и переменных токов (рисунок 2), бесконтактные потенциометры, датчики угла поворота и прочие приложения, работающие с непрерывными сигналами. Кроме усилителя и схем температурной компенсации микросхемы, в зависимости от специализации, могут содержать множество других узлов, например, АЦП, компараторы тревожных сигналов для активизации центрального микроконтроллера, контроллеры популярных интерфейсов передачи данных, (USART, I2C, SPI и других), а также энергонезависимую память для хранения настроек.
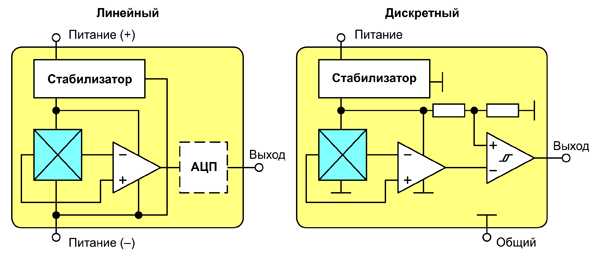
Рис. 1. Структурные схемы датчиков Холла
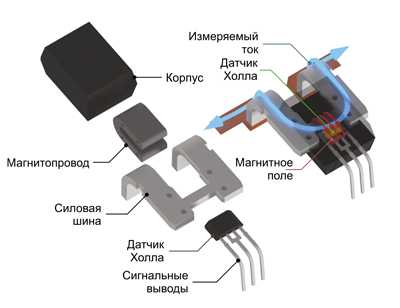
Рис. 2. Датчик Холла для измерения тока
Когда абсолютное значение индукции магнитного поля не имеет значения, а важно определить лишь факт наличия или отсутствия магнитного поля – используют датчики Холла с дискретным выходом. В эти микросхемы обычно интегрируются один или несколько компараторов с гистерезисом, сравнивающих напряжение на выходе дифференциального усилителя с пороговыми уровнями. Областью применения дискретных датчиков Холла является широкий спектр автоматизированных приложений: датчики открытия дверей, частотомеры, синхронизаторы, автомобильные системы зажигания, контроллеры подвижных элементов (клапанов, задвижек, крышек и прочего), охранные системы, устройства управления электродвигателями и многие другие.
Классическим примером использования дискретных датчиков Холла являются электродвигатели, используемые в компьютерном оборудовании (рисунок 3). Размещенный на плате двигателя датчик Холла измеряет напряженность магнитного поля, создаваемого постоянным магнитом ротора, формируя импульсный сигнал с логическими уровнями, частота которого пропорциональна частоте вращения, что позволяет оценить как исправность, так и производительность вентилятора.
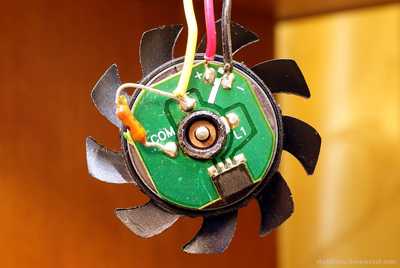
Рис. 3. Датчик Холла в компьютерном вентиляторе
Относительно новой областью применения дискретных датчиков Холла являются устройства дистанционного мониторинга, в которых они постепенно вытесняют традиционно используемые в данных приложениях герметичные электромеханические контакты (герконы). Например, использование датчика Холла совместно с трехосевым акселерометром в беспроводном дверном датчике DMS-100, выпускаемом компанией Pandora (рисунок 4), позволяет распознать удар, поворот и состояние (открыто/закрыто) дверей, люков, крышек кофров, багажников, прицепов. Поскольку датчик DMS-100 использует беспроводной интерфейс передачи данных и питается от аккумулятора, его можно легко и быстро разместить в труднодоступных местах.

Рис. 4. Беспроводной датчик двери Pandora DMS-100
Основными преимуществами датчиков Холла по сравнению с герконами являются высокая надежность, компактность и повышенная чувствительность. Кроме этого, измерительный элемент может определять не только величину, но и полярность магнитного поля, в том числе – по нескольким координатам. Все эти преимущества позволяют позиционировать датчики Холла в качестве перспективной элементной базы.
В случае, когда непрерывный мониторинг объекта не требуется (например, для систем безопасности), энергопотребление датчика Холла может быть снижено за счет перевода в прерывистый режим работы. Например, при контроле двери или окна нет необходимости постоянно определять их состояние, достаточно это делать несколько раз в секунду, ведь скорость их перемещения относительно невелика. Благодаря тому, что измерительный элемент датчика Холла является практически безынерционным, а современная элементная база отличается высоким быстродействием, для проведения измерений уровня магнитного поля без ущерба для точности достаточно всего нескольких десятков микросекунд. Таким образом, если микросхема датчика большую часть времени будет находиться в спящем режиме, при котором потребляемый ток снижается до уровня нескольких микроампер, то среднее значение тока, потребляемого датчиком, может быть уменьшено на несколько порядков.
Например, пусть для проведения измерений достаточно 100 мкс и тока 5 мА. Если проводить измерения 10 раз в секунду с интервалом 100 мс, то при токе потребления в спящем режиме 5 мкА средний потребляемый ток Iср будет рассчитан по формуле 1 (рисунок 5): $$I_{ср}=\frac{T_{1}}{T}\times I_{1}+\frac{T_{2}}{T}\times I_{2},\qquad{\mathrm{(}}{1}{\mathrm{)}}$$
где T1 = (t1 – 0) – продолжительность этапа измерения, T2 = (T – t1) – продолжительность спящего режима, то есть (0,1/100)∙5000 + (99,9/100)∙5 ≈ 10 мкА.
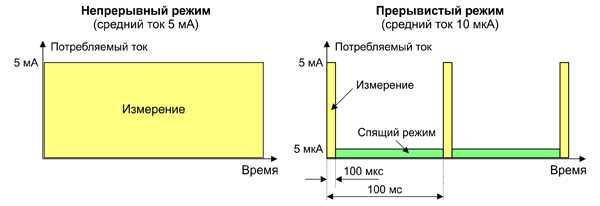
Рис. 5. Сравнение энергопотребления датчиков Холла при различных режимах работы (в условном масштабе)
Это в 500 раз меньше тока 5 мА, который бы потребляла микросхема, выполняя непрерывные измерения. Таким образом, использование прерывистого режима является эффективным средством уменьшения энергопотребления дискретных датчиков Холла без ущерба для их функциональности, что делает их идеальными для широкого круга компактных приложений с батарейным питанием.
Малопотребляющие датчики Холла производства Texas Instruments
В ассортименте TI на момент написания статьи присутствуют две модели датчиков с ультрамалым потреблением, взаимно дополняющие друг друга по своей функциональности. Ключевым отличием предлагаемых приборов является метод формирования выходного сигнала. Микросхемы DRV5032 фиксируют наличие магнитного поля с индукцией выше порогового значения, которое, в зависимости от модификации, может находиться в диапазоне 3,8…63 мТл (рисунок 6), в то время как датчики DRV5012 имеют функцию защелки, состояние которой меняется только при изменении полярности магнитного поля (рисунок 7). Это и определяет практическое назначение микросхем: DRV5032 предназначены, в первую очередь, для определения наличия каких-либо объектов, например, для фиксации открытия окна или двери, и могут работать с обычными двухполюсными магнитами, а DRV5012 – для измерения движения, например, ротора электродвигателя, и больше ориентированы на работу с многополюсными магнитами.
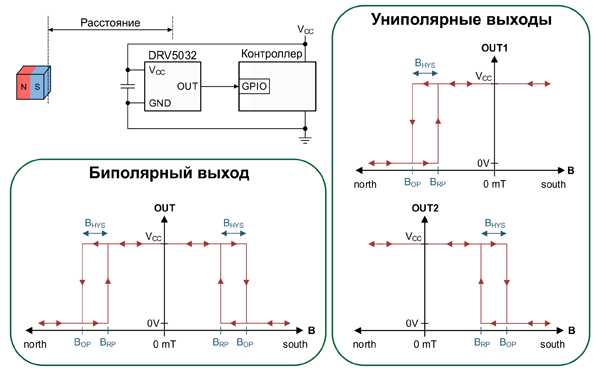
Рис. 6. Принцип работы датчиков DRV5032
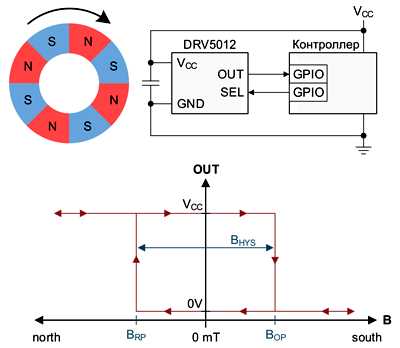
Рис. 7. Принцип работы датчиков DRV5012
Упрощенная структурная схема датчиков DRV5032 показана на рисунке 8, а их технические характеристики приведены в таблице 1. В микросхеме интегрированы: стабилизатор напряжения, обеспечивающий необходимый режим работы всех узлов в широком диапазоне питающего напряжения, управляемый источник тока для измерительного элемента, дифференциальный операционный усилитель с компенсирующими цепями, устраняющими влияние температуры и напряжения смещения, присутствующего на выходе измерительного элемента, и управляющие выходами логические элементы. Из внешних компонентов для устойчивой работы прибора необходим лишь блокировочный керамический конденсатор емкостью не менее 0,1 мкФ, устраняющий переходные процессы в цепи питания, обусловленные импульсным характером потребляемого тока.
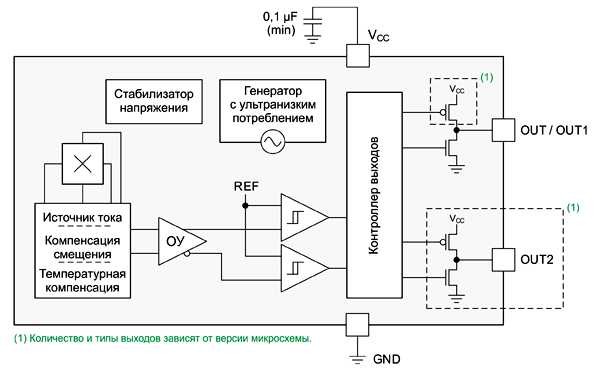
Рис. 8. Структурная схема микросхем DRV5032
Таблица 1. Технические характеристики микросхем DRV5032
| Чувствительность, мТл | 3,9 | 4,8 | 4,8 | 4,8 | 4,8 | 9,5 | 63 |
| Тип чувствительности к магнитному полю | Униполярный | Биполярный | Биполярный | Биполярный | Униполярный | Биполярный | Биполярный |
| Тип выходов | Двухтактный | Двухтактный | Двухтактный | Открытый сток | Двухтактный | Открытый сток | Открытый сток |
| Количество выходов | 1, 2* | 1 | 1 | 1 | 2* | 1 | 1 |
| Частота опроса, тип., Гц | 20 | 20 | 5 | 20 | 20 | 20 | 20 |
| Напряжение питания, В | 1,65…5,5 | 1,65…5,5 | 1,65…5,5 | 1,65…5,5 | 1,65…5,5 | 1,65..5,5 | 1,65…5,5 |
| Максимальный ток в активном режиме, тип., мА | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Средний потребляемый ток, тип.**, мкА | 1,3…2,3 | 1,3…2,3 | 0,54…1,06 | 1,3…2,3 | 1,3…2,3 | 1,3…2,3 | 1,3…2,3 |
| Длительность активного режима, тип., мкс | 55 | 55 | 55 | 55 | 55 | 55 | 55 |
| Продолжительность измерения, тип., мкс | 40 | 40 | 40 | 40 | 40 | 40 | 40 |
| Рабочая температура, °С | -40…85 | -40…85 | -40…85 | -40…85 | -40…85 | -40…85 | -40…85 |
| Корпус | SOT-23, X2SON | SOT-23, X2SON | SOT-23 | SOT-23 | X2SON | SOT-23, X2SON | SOT-23 |
| * В зависимости от типа корпуса: SOT-23 – один выход (срабатывает при ориентации магнита южным полюсом к датчику); X2SON – два выхода (для северного и южного полюсов). ** При напряжении питания 1,8…5,0 В. |
В зависимости от версии, микросхемы DRV5032 могут быть чувствительны к полярности внешнего магнитного поля. У биполярных версий выходное напряжение принимает низкий логический уровень при увеличении индукции магнитного поля выше порогового значения, независимо от полярности (рисунок 6). Это упрощает производство оборудования, поскольку в этом случае исключается операция позиционирования полюсов магнита. Униполярные версии (с суффиксами DU и FD) могут иметь два выхода: выход OUT1 переводится в состояние логического нуля при ориентировании магнита северным полюсом к прибору, а OUT2 – южным (рисунок 9). Возможность определения полярности магнитного поля расширяет функциональность конечных приложений, позволяя определять не только наличие объекта, но и его ориентацию. В микросхемах с суффиксом DU, выпускаемых в трехвыводном корпусе SOT-23, выход OUT1 отсутствует, и они позволяют определить лишь наличие магнита, ориентированного к датчику южным полюсом.
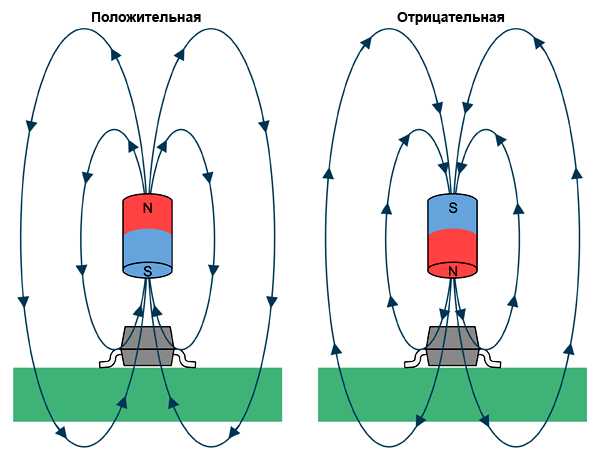
Рис. 9. Ориентация магнитного поля для датчиков DRV5032
Тип выходов также зависит от версии прибора. В семействе присутствуют как микросхемы с двухтактным выходом, что дает возможность подключать выходы датчиков напрямую к портам микроконтроллера без использования внешних подтягивающих резисторов, так и приборы с выходом типа «открытый сток», позволяющие объединять выходы нескольких датчиков по схеме монтажного ИЛИ. Кроме этого, широкий диапазон напряжений питания 1,65…5,5 В позволяет использовать микросхемы DRV5032 с большинством популярных серий микроконтроллеров без использования дополнительных схем согласования уровней логических сигналов.
Для проведения измерений напряженности внешнего магнитного поля микросхемам DRV5032 достаточно в среднем 40 мкс. При этом все версии, кроме приборов с суффиксом FB, выполняют 20 измерений в секунду. Это позволяет при максимальном потребляемом токе 2 мА уменьшить величину его среднего значения до уровня 1,3…2,4 мкА. Еще большую экономичность обеспечивают микросхемы с суффиксом FB, у которых частота измерений уменьшена до 5 Гц, что позволяет довести средний ток потребления до уровня 0,54…1,6 мкА.
Структурная схема микросхем DRV5012 (рисунок 10) и их технические характеристики (таблица 2) во многом аналогичны DRV5032. Кроме рассмотренного выше метода формирования выходного сигнала, еще одной отличительной особенностью DRV5012 является возможность управления частотой измерений с помощью вывода SEL. При наличии низкого уровня на этом входе микросхема будет измерять напряженность магнитного поля 20 раз в секунду, а при установке логической единицы частота измерений увеличивается до 2,5 кГц. Это позволяет использовать данные приборы в приложениях как с медленными, так и с быстро протекающими процессами, а также оптимизировать энергопотребление системы в различных режимах работы.
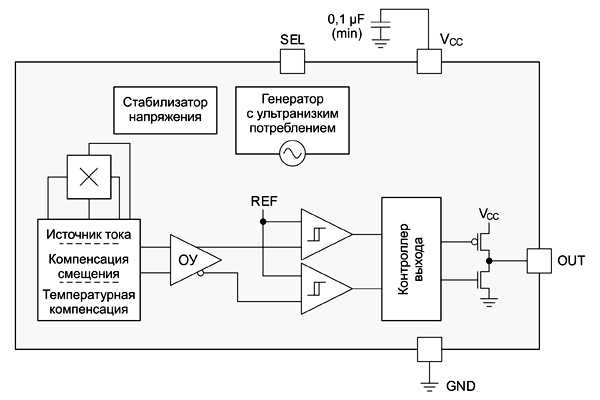
Рис. 10. Структурная схема датчиков DRV5012
Таблица 2. Технические характеристики микросхемы DRV5012
| Чувствительность, мТл | 2 | |
| Тип выхода | Двухтактный | |
| Напряжение питания, В | 1,65…5,5 | |
| Максимальный ток в активном режиме, тип., мА | 2 | |
| Длительность активного режима, тип., мкс | 55 | |
| Продолжительность измерения, тип., мкс | 40 | |
| Рабочая температура, °С | -40…85 | |
| Корпус | X2SON | |
| Частота опроса, тип., Гц | 20 | 2500 |
| Средний потребляемый ток при напряжении питания 1,8…5,0 В, тип., мкА | 1,3…2,0 | 142…160 |
Малопотребляющие датчики Холла от Honeywell
В ассортименте одного из старейших производителей датчиков Холла – компании Honeywell – также присутствуют две модели малопотребляющих датчиков положения, отличающихся лишь чувствительностью.
Структурная схема (рисунок 11), технические характеристики (таблица 3) и принцип работы микросхем SM351 и SM353 во многом аналогичны рассмотренным выше микросхемам DRV5032 производства компании Texas Instruments. Для уменьшения энергопотребления питание на аналоговые узлы подается только во время измерений, продолжительность которых составляет 15 мкс. Коммутация питания осуществляется с помощью транзисторного ключа, управляемого таймером, содержащим тактовый генератор, счетчик, дешифратор и другие необходимые компоненты. Средняя частота измерений напряженности магнитного поля равна 10 Гц. При напряжении питания 1,8 В такой режим работы при типовом значении тока в режиме измерений около 1 мА позволяет уменьшить средний ток микросхемы до уровня, не превышающего 0,4 мкА.
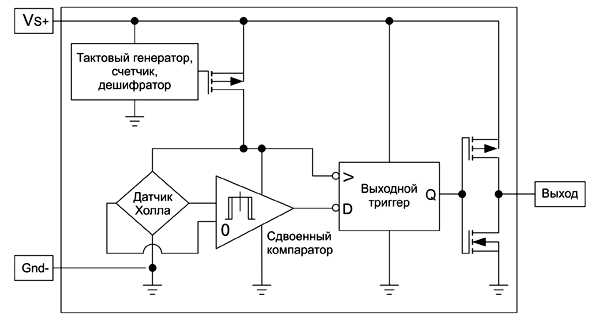
Рис. 11. Структурная схема датчиков SM351 и SM353
Микросхемы SM351 и SM353 нечувствительны к полярности внешнего магнитного поля и имеют двухтактные выходы, позволяющие подключать их к микроконтроллеру без использования внешних подтягивающих резисторов. Оба прибора выпускаются в компактных корпусах SOT-23 и могут работать в широком диапазоне питающих напряжений (1,65…5,5 В) и температур (-40…85°С), что позволяет использовать их в автомобильной и промышленной электронике совместно с большинством наиболее популярных микроконтроллеров.
Таблица 3. Технические характеристики датчиков Холла производства Honeywell при напряжении питания 1,8 В
| Тип выхода | Двухтактный | |
| Напряжение питания, В | 1,65…5,5 | |
| Длительность активного режима, тип., мкс | 15 | |
| Рабочая температура, °С | -40…85 | |
| Корпус | SOT-23 | |
| Частота опроса, тип., Гц | 10 | |
| Чувствительность, мТл | 0,7 | 1,4 |
| Максимальный ток в активном режиме, тип., мА | 1 | 0,8 |
| Средний потребляемый ток, мкА | 0,36 | 0,31 |
В отличие от изделий Texas Instruments, датчикам Honeywell необходима другая ориентация магнитного поля. Для корректной работы внешние магниты должны быть ориентированы полюсами к торцевой поверхности микросхем (рисунок 12), в то время как для датчиков Texas Instruments такое расположение магнитов попадает в «слепую» зону.
Рис. 12. Ориентация магнитного поля для датчиков SM351 и SM353
Исследование характеристик датчиков Холла
Для проверки фактических характеристик малопотребляющих датчиков Холла мы сравнили микросхемы SM351LT и SM353LT компании Honeywell и DRV5032FA и DRV5032FB компании Texas Instruments. Эти приборы имеют одинаковые функциональное назначение, корпус и тип выходов и отличаются только чувствительностью, скоростью реакции и энергопотреблением. При подготовке статьи было проведено исследование пяти образцов микросхем каждой модели.
Схема и внешний вид измерительной установки показаны на рисунке 13. Каждый датчик смонтирован на отдельной макетной плате, содержащей керамический конденсатор С2, предназначенный для исключения переходных процессов в цепи питания, и резистор R3, позволяющий с помощью осциллографа контролировать форму потребляемого тока. При проведении измерений, не связанных с контролем временных диаграмм, резистор R3 замыкается внешней проволочной перемычкой.
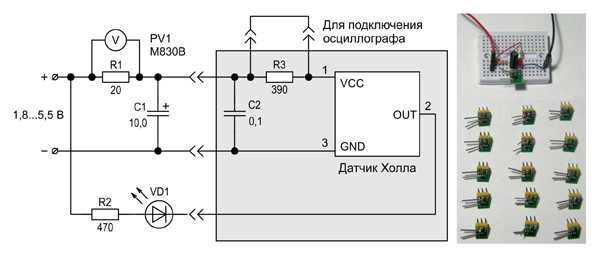
Рис. 13. Схема измерений
Мультиметр PV1 предназначен для измерения среднего значения тока в цепях питания микросхем. Он измеряет падение напряжения на резисторе R1, сопротивление которого выбрано таким образом, чтобы при токе 1 мА разность потенциалов на нем была равна 200 мВ. Это позволяет на самом чувствительном пределе мультиметра 200 мВ измерять ток в диапазоне 0…1 мА с разрешением 0,005 мкА, что вполне достаточно для проведения исследований.
Электролитический конденсатор С1 предназначен для исключения возможной просадки напряжения во время измерений из-за увеличения внутреннего сопротивления источника питания после добавления резистора R1. Элементы R1 и С1 образуют фильтр нижних частот с постоянной времени 0,2 с, что намного больше длительности измерений (15 мкс для SM351LT и SM353LT, 40 мкс – для DRV5032FA и DRV5032FB).
Срабатывание датчика контролируется с помощью светодиода VD1, ток которого ограничивается резистором R2. Для исключения влияния нагрузки микросхемы на величину потребляемого ею тока светодиод подключен к положительному полюсу источника питания отдельным проводом, минуя фильтр R1C1.
Питание схемы осуществляется от регулируемого источника постоянного тока с контролем величины выходного напряжения. Поскольку измерение напряжения питания осуществляется до фильтра R1C1, его фактическое значение на выводах микросхем будет меньше на величину падения напряжения на резисторе R1, которое может достигать 60 мВ при напряжении питания 5 В. Поскольку проведенные исследования являются оценочными, этим можно пренебречь, ведь подключение мультиметра, обладающего хоть и высоким, но все-таки конечным внутренним сопротивлением, непосредственно к выводам питания микросхем привело бы к появлению дополнительной погрешности в измерениях тока.
Результаты измерений потребляемого тока приведены в таблице 4. Как видно из полученных данных, все исследованные датчики имеют хорошую повторяемость параметров, а полученные значения соответствуют типовым величинам, указанным в технической документации.
Анализируя зависимости средних значений потребляемого тока от напряжения питания (рисунок 14) можно увидеть, что энергопотребление приборов производства компании Texas Instruments меньше зависит от этого параметра, чем датчиков Honeywell. Вместе с этим, при напряжениях питания менее 4 В микросхемы Honeywell более экономичны, чем продукция Texas Instruments.
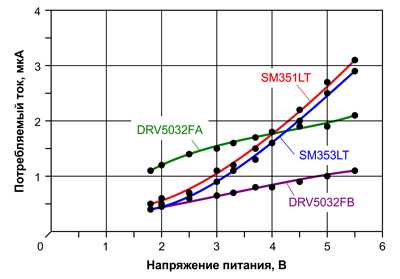
Рис. 14. Зависимости потребляемого тока от напряжения питания
На графиках, изображенных на рисунке 14, также хорошо видно влияние частоты измерений на энергопотребление. Ток, потребляемый микросхемой DRV5032FA с частотой 20 Гц, во всем диапазоне питающих напряжений практически в два раза больше тока микросхемы DRV5032FB, имеющей частоту 5 Гц. Можно предположить, что DRV5032FB имеет минимально возможное энергопотребление для данной технологии, и дальнейшее уменьшение частоты измерений вплоть до нуля уже не окажет существенного влияния на величину потребляемого тока.
Таблица 4. Результаты измерений потребляемого тока при температуре 27°С
| SM351LT | 1 | 0,43 | 0,54 | 0,75 | 1,06 | 1,26 | 1,42 | 1,74 | 2,20 | 2,76 | 3,08 |
| 2 | 0,44 | 0,51 | 0,73 | 1,00 | 1,20 | 1,40 | 1,75 | 2,15 | 2,60 | 3,00 | |
| 3 | 0,46 | 0,54 | 0,76 | 1,04 | 1,26 | 1,43 | 1,76 | 2,19 | 2,63 | 3,19 | |
| 4 | 0,45 | 0,50 | 0,74 | 1,05 | 1,25 | 1,52 | 1,81 | 2,18 | 2,68 | 3,15 | |
| 5 | 0,45 | 0,52 | 0,72 | 1,03 | 1,25 | 1,45 | 1,73 | 2,17 | 2,76 | 3,14 | |
| SM353LT | 1 | 0,39 | 0,45 | 0,65 | 0,92 | 1,09 | 1,28 | 1,60 | 1,99 | 2,47 | 2,81 |
| 2 | 0,39 | 0,43 | 0,65 | 0,90 | 1,08 | 1,27 | 1,53 | 2,00 | 2,38 | 2,84 | |
| 3 | 0,37 | 0,47 | 0,68 | 0,92 | 1,07 | 1,27 | 1,61 | 1,95 | 2,50 | 2,90 | |
| 4 | 0,44 | 0,48 | 0,69 | 0,92 | 1,09 | 1,29 | 1,62 | 1,93 | 2,50 | 2,91 | |
| 5 | 0,40 | 0,47 | 0,67 | 0,93 | 1,12 | 1,32 | 1,60 | 2,01 | 2,41 | 2,93 | |
| DRV5032FA | 1 | 1,10 | 1,18 | 1,41 | 1,51 | 1,58 | 1,64 | 1,72 | 1,80 | 1,95 | 2,10 |
| 2 | 1,14 | 1,20 | 1,45 | 1,53 | 1,60 | 1,67 | 1,73 | 1,83 | 1,95 | 2,03 | |
| 3 | 1,12 | 1,21 | 1,51 | 1,59 | 1,65 | 1,70 | 1,79 | 1,85 | 2,00 | 2,20 | |
| 4 | 1,11 | 1,23 | 1,46 | 1,54 | 1,59 | 1,64 | 1,73 | 1,80 | 1,90 | 2,06 | |
| 5 | 1,07 | 1,14 | 1,39 | 1,48 | 1,52 | 1,60 | 1,67 | 1,75 | 1,86 | 2,05 | |
| DRV5032FB | 1 | 0,49 | 0,50 | 0,61 | 0,66 | 0,71 | 0,75 | 0,79 | 0,88 | 1,01 | 1,13 |
| 2 | 0,49 | 0,50 | 0,59 | 0,64 | 0,70 | 0,75 | 0,78 | 0,88 | 1,00 | 1,15 | |
| 3 | 0,50 | 0,53 | 0,62 | 0,66 | 0,71 | 0,76 | 0,83 | 0,90 | 1,02 | 1,16 | |
| 4 | 0,48 | 0,51 | 0,60 | 0,63 | 0,70 | 0,75 | 0,80 | 0,86 | 1,00 | 1,15 | |
| 5 | 0,49 | 0,52 | 0,61 | 0,65 | 0,70 | 0,75 | 0,81 | 0,91 | 1,03 | 1,17 | |
Форму тока, потребляемого микросхемами, можно увидеть, удалив перемычку и подключив осциллограф к резистору R3. Результаты измерений (рисунок 15) подтверждают, что он имеет ярко выраженный импульсный характер и отличается в активном и спящем режимах на несколько порядков.
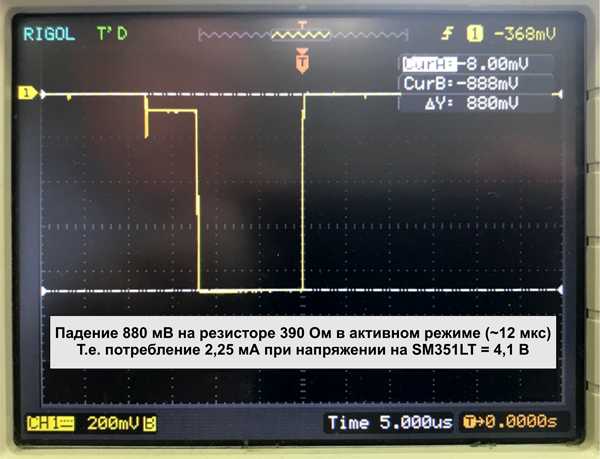
Рис. 15. Форма тока, потребляемого микросхемой SM351LT
Другой важной характеристикой датчиков Холла является чувствительность, определяющая особенности практического применения, а также требования к характеристикам и расположению источников магнитного поля. В технической документации на микросхемы указывается величина индукции в точке, соответствующей расположению корпуса прибора. Однако на напряженность магнитного поля существенно влияет расстояние, поэтому при использовании реальных магнитов датчик будет срабатывать на определенной дистанции, зависящей от их геометрических размеров и остаточной индукции.
Для оценки расстояния, необходимого для срабатывания датчика, можно воспользоваться документацией TI или информационными материалами, посвященными датчикам Холла. Для постоянных магнитов прямоугольной формы индукцию на расстоянии D от поверхностей полюсов магнита можно определить по формуле 2: $$\vec{B}=\frac{B_{r}}{\pi}\times \left(\arg \tan \left(\frac{WL}{2D\times\sqrt{4D^{2}+W^{2}+L^{2}}}\right)-\arg \tan \left(\frac{WL}{2(D+T)\times\sqrt{4(D+T)^{2}+W^{2}+L^{2}}}\right)\right).\qquad{\mathrm{(}}{2}{\mathrm{)}}$$
А для цилиндрических – по формуле 3: $$\vec{B}=\frac{B_{r}}{2}\times \left(\frac{D+T}{\sqrt{(0.5C)^{2}+(D+T)^{2}}}-\frac{D}{\sqrt{(0.5C)^{2}+D^{2}}}\right),\qquad{\mathrm{(}}{3}{\mathrm{)}}$$
где W – ширина, L – длина, T – толщина, С – диаметр, Br – индукция магнита (рисунок 16).
Рис. 16. Определение индукции магнитного поля на расстоянии от поверхности постоянных магнитов
Для этой цели также можно воспользоваться онлайн-калькулятором, доступным на сайте Texas Instruments. Преимуществом последнего варианта является возможность быстрого определения расстояния, на котором будет срабатывать конкретный прибор. Например, введя параметры постоянного магнита на странице, посвященной датчикам DRV5032, можно сразу определить как величину индукции в нужной точке, так и расстояния, на которых сработают все версии микросхем данной модели (рисунок 17).
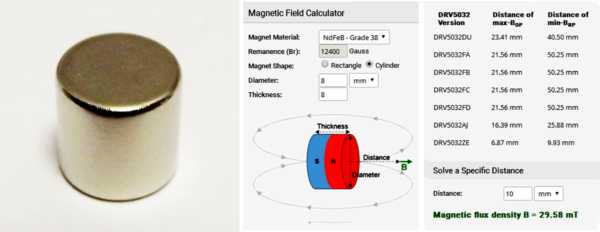
Рис. 17. Онлайн-калькулятор Texas Instruments
Именно этот калькулятор и был использован для определения индукции, создаваемой используемым в измерениях цилиндрическим постоянным магнитом из материала N38 8 х 8 мм (рисунок 17).
Результаты измерений чувствительности датчиков приведены в таблице 5. Согласно полученным данным, при использовании указанного выше магнита датчики Texas Instruments срабатывали на среднем расстоянии 24 мм, что соответствует индукции 3,6 мТл, и восстанавливали исходное состояние на среднем расстоянии 33…34 мм (при индукции 1,45…1,48 мТл). Во время проведения исследований магнит перемещался по оси, перпендикулярной верхней плоскости микросхемы и проходящей через ее центр (рисунок 9). Согласно технической документации, соответствующие характеристики этих приборов должны находиться в пределах 1,5…4,8 мТл (срабатывание) и 0,5…3,0 мТл (восстановление) во всем диапазоне питающих напряжений. Таким образом, все образцы микросхем DRV5032FA и DRV5032FB полностью отвечают заявленным характеристикам.
Таблица 5. Результаты измерений чувствительности при напряжении питания 5 В
| SM351LT | 1 | 35 | 38 |
| 2 | 35 | 39 | |
| 3 | 36 | 40 | |
| 4 | 37 | 40 | |
| 5 | 36 | 38 | |
| SM353LT | 1 | 32 | 35 |
| 2 | 30 | 34 | |
| 3 | 31 | 36 | |
| 4 | 32 | 37 | |
| 5 | 31 | 34 | |
| DRV5032FA | 1 | 24 | 33 |
| 2 | 25 | 35 | |
| 3 | 25 | 35 | |
| 4 | 24 | 32 | |
| 5 | 24 | 34 | |
| DRV5032FB | 1 | 24 | 34 |
| 2 | 25 | 35 | |
| 3 | 22 | 32 | |
| 4 | 24 | 34 | |
| 5 | 23 | 32 | |
При исследованиях датчиков Honeywell магнит перемещался в соответствии с рекомендациями производителя (рисунок 12). Датчики SM351LT срабатывали при среднем расстоянии между магнитом и микросхемой, равном 36 мм, что соответствует индукции 1,25 мТл, и восстанавливали свою работу на среднем расстоянии 39 мм, что соответствует индукции 1,0 мТл. Согласно технической документации, для микросхем SM351LT индукция срабатывания должна находиться в диапазоне 3…11 Гс (0,3…1,1 мТл), а отпускания – не менее 2 Гс (0,2 мТл), причем максимальное значение этой величины не нормируется. Как видно из результатов исследований, реальная чувствительность датчиков SM351LT оказалась несколько ниже величин, заявленных в технической документации, в отличие от микросхем SM353LT, срабатывавших при средней индукции 1,86 мТл (среднее расстояние 31 мм), находящейся в допустимом диапазоне 6…20 Гс (0,6…2,0 мТл).
Заключение
Охранные системы, счетчики энергоресурсов, медицинское оборудование, устройства интернета вещей – вот далеко не полный перечень приложений, в которых можно использовать датчики Холла, рассмотренные в данной статье. Ключевыми особенностями всей техники, в которой можно применить эти микросхемы, являются компактность и жесткие требования к энергопотреблению, ведь именно для этих целей они и были разработаны.
Несмотря на то, что рассмотренные приборы выпускаются разными производителями, по своим характеристикам они взаимно дополняют друг друга, обеспечивая комплексную аппаратную платформу, на основе которой разработчики могут решить множество практических задач.
Датчик Холла: принцип работы, предназначение, диагностика.
Датчик Холла (ДХ) является важнейшим элементом бесконтактной системы зажигания силовой установки в автомобиле. Даже при возникновении малейшей неполадки данного узла происходит сбой всей системы работы двигателя. Поэтому, во избежание ошибок при диагностике, необходимо знать, каким образом проверяется ДХ, а при возникновении необходимости уметь заменить его.
Датчик Холла (датчик положения распредвала) – одна из важнейших составляющих трамблера (прерыватель-распределитель). Расположен возле вала трамблера. На нем фиксируется пластина, обеспечивающая прохождение магнитных волн, и по виду напоминающая корону. Количество прорезей в пластине идентично количеству цилиндров в силовом агрегате. ДХ имеют действующий магнит внутри.

Расположение датчика
Эффект Холла
Суть работы узла строится на одноименном эффекте: возникновение поперечной разности (холловское напряжение) потенциалов в момент перемещения какого-либо проводника при постоянном напряжении в магнитное поле. Эффект достигается путем прохождения тока через клеммы пластины (расположена внутри поля магнита) с полупроводкой. Далее – боковые клеммы образуют напряжение.
Датчики Холла получили широкое применение при производстве автомобилей. Устройство позволяет определять, на какой угол отклонился распределительный вал, и даже коленчатый вал (некоторые автомобили). На авто, имеющими архаичный силовой агрегат, устройство сигнализировало о моменте образования искры.
История
Явление было открыто американским физиком – сотрудником балтиморского университета Э. Холлом в 1879 году. Суть открытия заключалась в следующем: помещение прямоугольной полупроводниковой пластины в магнитное поле с последующим подведением к ее сторонам электрического тока провоцировало образование напряжения на широких сторонах пластины (в диапазоне от десятков микровольт до милливольт, исчисляющимися сотнями).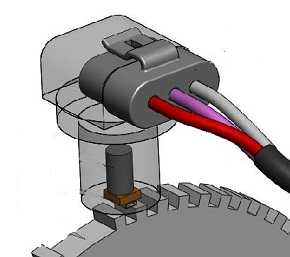 Эффект привлек внимание общественности, но его применение в области техники началось только по прошествии 75 лет – когда промышленными масштабами стали выпускать первые полупроводниковые пленки с необходимыми свойствами. Чуть позже – когда начала развиваться микроэлектроника, специалисты создали компактный агрегат, включающий в себя все необходимые элементы: постоянный магнит; микросхема, имеющая чувствительный элемент. Такое устройство обладает рядом неоспоримых достоинств.
Эффект привлек внимание общественности, но его применение в области техники началось только по прошествии 75 лет – когда промышленными масштабами стали выпускать первые полупроводниковые пленки с необходимыми свойствами. Чуть позже – когда начала развиваться микроэлектроника, специалисты создали компактный агрегат, включающий в себя все необходимые элементы: постоянный магнит; микросхема, имеющая чувствительный элемент. Такое устройство обладает рядом неоспоримых достоинств.
Особенности технологии
Преимущества новоявленного устройства:
- Небольшие габариты.
- Наличие важного параметра, который позволяет изменять частоту срабатывания (обороты двигателя) при отсутствии смещения измерительного момента.
- Наличие «прямоугольного» сигнала от агрегата (профессиональная терминология: набор определенной и постоянной величины узлом при его включении, при этом скачки в напряжении отсутствуют). Это большое достоинство для области управления электроникой.
Недостатки:
- Чувствительность к помехам электромагнитных полей, которые возникают в цепочке питания.
- Датчик Холла имеет более высокую стоимость относительно магнитоэлектрического и обладает меньшей надежностью (теоретически). Это связано с наличием у него электронной схемы, производство в крупных масштабах, прогрессивные технологии снижают данные факторы до минимума.
Алгоритм действия
 Принцип работы датчика Холла строится на изменении траектории движения заряженных частиц в полупроводнике при преобразовании магнитного поля, которое пересекает полупроводник. Магнитное поле образуется посредством постоянного магнита, что расположен в ДХ. Преобразование магнитного поля осуществляется замыканием репера (металлический зуб) магнитного зазора. Репер расположен на шкиву (либо особом задающем диске) с зубчатыми элементами, что крепится к распределительному валу.
Принцип работы датчика Холла строится на изменении траектории движения заряженных частиц в полупроводнике при преобразовании магнитного поля, которое пересекает полупроводник. Магнитное поле образуется посредством постоянного магнита, что расположен в ДХ. Преобразование магнитного поля осуществляется замыканием репера (металлический зуб) магнитного зазора. Репер расположен на шкиву (либо особом задающем диске) с зубчатыми элементами, что крепится к распределительному валу.
Репер в момент прохождения рядом с устройством образует импульс напряжения, передающийся к ЭБУ. Передаваемый сигнал на ДХ зависит от частоты, с которой вращается распредвал, и поступает на различных временных промежутках. Блок управления (ЭБУ) расшифровывает поступающие сигналы и определяет положение верхней мертвой точки такта сжатия (ВМТ) поршня в первом цилиндре. После – обеспечивается поступление топливно-воздушной смеси в камеру сгорания с ее последующим воспламенением.
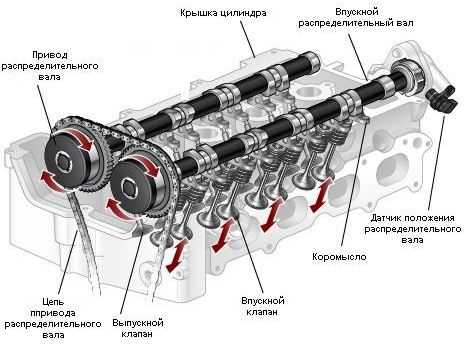
На автомобиле с двигателем, имеющим систему изменения фаз газораспределительного механизма, ДХ выполняет функцию управления этим механизмом. ДХ располагается на распредвале впускных/выпускных клапанов. Датчик Холла оснащен тремя клеммами:
- на «массу»;
- «плюсовая» с входным напряжением порядка 6 В;
- выходная. С нее преобразованный сигнал импульса отправляется на коммутатор.
Устройство работы
На дизельном моторе
Чуть иначе функционирует ДХ мотора, работающего на тяжелом топливе. Сигналы агрегата предназначены для фиксации прохождения поршнями ВМТ в каждом цилиндре. Благодаря этому, положение распредвала по отношению к коленвалу определяется с высокой точностью. Этим контролируется точность момента впрыска, что обеспечивает моментальный запуск дизельного силового агрегата и его устойчивая на любых оборотах.
С целью реализации поставленных задач конструкция претерпела изменения – доработан задающий диск, который имеет реперы для каждой камеры сгорания: сюда можно отнести части диска с разной угловой шириной либо комплект реперов, располагающихся на различной дистанции по отношению друг к другу.
Пример: дизельная силовая установка, имеющая четыре цилиндра оснащена задающим диском с 7 зубьями. Четыре репера являются основными (при перпендикулярном расположении к каждому цилиндру), еще три – дополнительные (распознавание определенного цилиндра, расположенные на различном расстоянии друг к другу и устанавливающие в конкретной камере сгорания поршень в ВМТ.
Основные виды
Датчики Холла подразделяются на две категории:
- с аналоговым принципом работы (биполярный). Такой ДХ преобразовывает полярную индукцию в напряжение. Показания узла зависят от его же полярности, а также мощности поля. Расстояние монтажа агрегата влияет на его характеристики;
- с цифровым (униполярный). Датчик Холла с подобным принципом действия позволяет выявлять наличие/отсутствия поля – в момент достижения условного предела индукцией узел отображает «0»/»1″, что логично.
Признаки неполадок
Основные:
- силовой агрегат имеет проблематичный запуск либо вовсе не запускается;
- холостой ход работы силовой установки сопровождается перебоями/рывками;
- дергание автомобиля на ходу при повышенных/высоких оборотах;
- прекращение работы двигателя по ходу движения.
Наличие одного/нескольких признаков является предпосылкой к проведению диагностики двигателя. Подобные симптомы могут свидетельствовать о том, что ДХ неисправен.
Диагностика
Датчик Холла проверяется:
- Посредством вольтметра.
- С использованием отвёртки с крестовой насадкой.
- С контрольной лампой.
- Куском провода.

Диагностика с помощью МД-1
Устройство можно проверить несколькими способами:
- самый простой – предварительно заменить ДХ. И если исчезли вышеперечисленные признаки – требуется замена «родного»;
- измерение выходного напряжения тестером – устройство должно показывать скачки напряжения в диапазоне 0,4-11 В;
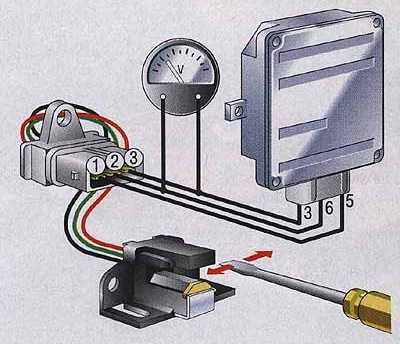
- имитация работы узла. С трамблера изымается колодка с тремя штекерами, включается зажигание, отрезок провода соединяется с 3/6 выходами колодки. Образование искры говорит о том, что устройство нужно менять.
Быстрой способ проверки. Датчик Холла можно проверить, не прибегая к полному его демонтажу. Для этого необходимо:
- Снять узел с трамблера (демонтаж с пластина не обязателен);
- колодки оставить подключенными;
- расположить центральный провод катушки зажигания возле «массы»;
- включить зажигание;
- провести между контактов (датчик Холла) металлическим предметом, при этом нужно сделать так, что предмет вышел за пределы контактов – поступательное движение вверх;
- если при манипуляции металлических предметом на конце провода возникает искра – датчик Холла исправен.
Замена
Алгоритм действия следующий:
- Снять трамблер.
- Снять крышку трамблера.
- Совместить метку газораспределительного механизма с меткой коленчатого вала.
- Запомнить положение трамблера (лучше всего сделать соответствующую метку).
- Открутить элементы крепежа посредством гаечного ключа.
- Извлечь фиксаторы/стопоры (если имеются).
- Вытащить из трамблера вал.
- Снять клеммы с ДХ.
- Открутить устройство. Для этого необходимо оттянуть на себя регулятор и осторожно изъять неисправный датчик Холла через образовавшееся отверстие.
- Установка и последующая сборка – в обратном порядке.
Датчик Холла. Общее описание
(36 голосовало, оценка: 3,97 из of 5) Загрузка...
ДАТЧИК ХОЛЛА. ОБЩЕЕ ОПИСАНИЕ
НПФ Электропривод
Принцип действия датчика Холла
Интегральные датчики магнитного поля в своём большинстве используют эффект Холла, открытый американским физиком Эдвином Холлом (E. Hall) в 1879 г. Эффект Холла состоит в следующем. Если проводник с током помещён в магнитное поле, то возникает э.д.с., направленная перпендикулярно и току, и полю. Эффект Холла иллюстрируется на рис. 1. По тонкой пластине полупроводникового материала протекает ток I. При наличии магнитного поля на движущиеся носители заряда (электроны) действует сила Лоренца. Эта сила искривляет траекторию движения электронов, что приводит к перераспределению объёмных зарядов в полупроводниковой пластине. Вследствие этого на краях пластины, параллельных направлению протекания тока, возникает э.д.с., называемая э.д.с. Холла. Эта э.д.с. пропорциональна векторному произведению индукции B на плотность тока j:
| Рис.1 Иллюстация эффекта Холла |
| Рис.2 Расположение двух элементов Холла на ИМС, компенсирующее ошибку, вызванную механической деформацией кристалла |
где d – ширина пластины, q – заряд частицы-носителя, n – концентрация носителей. При снижении концентрации носителей э.д.с. Холла возрастает, поэтому в качестве материала для датчиков Холла предпочтительно использование таких полупроводников, как кремний, арсенид галлия и др. Для прямоугольной пластины с однородными током и магнитным полем, направленными, как показано на рис. 1, эта э.д.с. равна
где kн – постоянная Холла, VS – напряжение, создаваемое на токоподводящих выводах датчика Холла. Для кремния kн составляет величину по рядка 70 мВ/(В•Тл), поэтому, как правило, э.д.с. датчика Холла требуется усиливать. Кремний обладает тензорезистивным эффектом, заключающимся в изменении сопротивления при механических напряжениях. Желательно уменьшить это влияние в датчике Холла. Это достигается соответствующей ориентацией элемента Холла на интегральной схеме и использованием нескольких элементов на кристалле. На рис. 2 показаны два элемента Холла, расположенные рядом на кристалле ИМС. Они позиционированы так, что испытывают практически одинаковое механическое напряжение, вызывающее изменение R. К элементу, который на рисунке изображён слева, приложено напряжение возбуждения VS, направленное по вертикальной оси, а к изображённому справа – по горизонтальной. При сложении сигналов этих двух датчиков ошибка, вызванная деформацией кристалла, компенсируется.
Интегральные датчики Холла
| Рис.3 Схема ИМС линейного датчика Холла (а) и график его характеристики преобразования (б) |
Датчики Холла являются основой многих типов датчиков, таких как датчики линейного или углового перемещения, датчики магнитного поля, датчики тока, датчики расхода и др. Удобство бесконтактного срабатывания (полное отсутствие механического износа), низкая стоимость, простота использования делают их незаменимыми в приборостроении, автомобильной, авиационной и других отраслях промышленности. Интегральные датчики Холла производят такие фирмы, как Honeywell, Melexis, Allegro Microsystems, Micronas Intermetall, Siemens, Analog Devices и др. Первая группа интегральных датчиков Холла – это линейные устройства, применяющиеся в измерителях напряжённости магнитного поля. Как правило, эти устройства содержат схемы усиления сигнала датчика. Необходимая предварительная обработка сигнала обычно заключается в усилении и температурной компенсации. Может понадобиться также стабилизация питающего напряжения. При отсутствии магнитного поля выходное напряжение датчика должно быть равно нулю, поэтому требуется дифференциальный усилитель (рис. 3). Современные технологии позволяют ввести в состав ИМС датчиков магнитного поля сложные цифровые системы обработки информации. Примером такой ИМС может служить HAL805 фирмы Micronas Intermetall, содержащий на кристалле в трёхвыводном корпусе ТО92 АЦП, ЦАП, ЦПС и энергонезависимую память.
| Рис.4 Логический датчик Холла |
Такая структура позволяет программировать чувствительность и смещение датчика, осуществлять фильтрацию помех и механических возмущений. Вторая группа включает в себя микросхемы компараторного типа с логическими уровнями напряжения на выходе. Эта группа более многочисленна в силу большего числа возможных применений. Микросхемы с логическим выходом (рис. 4а) делятся на две подгруппы: переключатели и триггеры. Униполярный переключатель срабатывает только при наличии магнитного поля одной полярности и гарантирует выключенное состояние в отсутствие магнитного поля; магнитное поле противоположной полярности не оказывает на него никакого влияния (см. рис. 4б). Биполярный триггер, напротив, реагирует на обе полярности: включается при приближении северного или южного полюсов магнита и выключается только в том случае, если поле с противоположным знаком достигнет определенного уровня. Термин «биполярный переключатель» обычно применяется к триггерам, реагирующим на пропадание поля. Такие переключатели переходят во включённое состояние при наличии магнитного поля, а выключаются при снижении уровня той же полярности, отсутствии поля, или в присутствии поля с противоположным знаком (см. рис. 4в). Наличие ступени гистерезиса, которая является разностью между величинами магнитного поля в точках включения и выключения, повышает помехозащищенность устройства. Логический двухвыводной датчик Холла HAL556 производит фирма Micronas Intermetall. Эта микросхема (рис. 5) потребляет большой ток при приближении положительного полюса магнита к маркированной стороне корпуса и малый ток при удалении. HAL566 реализует обратные функции. Микросхемы имеют встроенную систему, увеличивающую напряжение, приложенное непосредственно к кристаллу датчика Холла, с тем чтобы сделать возможным применение недорогих постоянных магнитов, имеющих сравнительно малую коэрцитивную силу.
Рис.5 Двухвыводный логический датчик HAL556 обеспечивает изменение протекающего через него тока при изменении уровня магнитного поля
Ниже рассматриваются некоторые наиболее популярные применения интегральных датчиков Холла. Перечень возможных применений этих датчиков далеко не ограничивается примерами, предложенными вниманию читателя. Технические задачи, для решения которых наиболее часто используются эти датчики, описываются в книге «Hall Effect Sensing and Application Book» (Honeywell MICRO SWITCH Sensing and Control. 1999.)
Линейные датчики Холла:
- датчики тока;
- приводы переменной частоты вращения;
- схемы управления и защиты электродвигателей;
- датчики положения;
- датчики расхода;
- бесколлекторные двигатели постоянного тока;
- бесконтактные потенциометры;
- датчики угла поворота;
- детекторы ферромагнитных тел;
- датчики вибрации;
- тахометры. Логические датчики Холла:
- датчики частоты вращения;
- устройства синхронизации;
- датчики систем зажигания автомобилей;
- датчики положения (обнаруживают перемещение менее 0,5 мм);
- счётчики импульсов (принтеры, электроприводы);
- датчики положения клапанов;
- блокировка дверей;
- бесколлекторные двигатели постоянного тока;
- измерители расхода;
- бесконтактные реле;
- детекторы приближения;
- считыватели магнитных карточек или ключей;
- датчики бумаги (в принтерах).
Датчики тока Линейные датчики Холла могут быть использованы в составе измерителей силы тока в пределах от 250 мА до тысяч ампер. Важнейшим достоинством таких датчиков является полное отсутствие электрической связи с измеряемой цепью. Линейные датчики позволяют измерять постоянные и переменные токи, в том числе токи довольно высокой частоты. Если линейный датчик Холла расположен вблизи проводника с током, то выходное напряжение датчика пропорционально индукции магнитного поля, окружающего проводник. Величина индукции, в свою очередь, пропорциональна току.
| Рис.6 Конструкция датчиков тока |
В простейшем случае датчик тока представляет собой конструкцию, в которой датчик Холла устанавливается около провода, по которому течёт измеряемый ток (рис. 6а). Такие датчики используются для измерения больших токов, особенно в линиях электропередач. Индукция В определяется по формуле:
где r – расстояние от центра чувствительной области датчика до оси симметрии проводника в метрах. Чувствительность датчика тока может быть значительно увеличена путём использования концентратора магнитного потока в виде магнитопровода с прорезью, в которую помещается линейный датчик Холла (рис. 6б). В этом случае индукция магнитного потока через датчик:
Линейный датчик обратной связи по положению
| Рис.7 Позиционный привод с датчиком Холла в обратной связи по положению |
Линейные датчики Холла могут быть использованы во многих видах позиционных приводов. Это иллюстрируется на рис. 7, где положение перемещаемой части, на которой закреплен магнит, устанавливается автоматически таким образом, чтобы разность между сигналом регулировки положения и сигналом датчика равнялась нулю. Бесколлекторные двигатели постоянного тока отличаются от обычных двигателей постоянного тока, имеющих коллекторно-щёточный узел, прежде всего тем, что коммутация секций якорной обмотки осуществляется электронной схемой, а не механическими скользящими контактами. Поэтому такие двигатели имеют гораздо большие надёжность и ресурс, требуют меньше обслуживания, почти не создают электромагнитных помех и могут использоваться при пониженном атмосферном давлении.
| Рис.8 Датчики положения ротора бесколлекторного двигателя постоянного тока |
Рисунок 8 показывает, как может быть получена информация о положении ротора для управления электронным коммутатором с помощью трёх датчиков Холла. Работа двигателя этого типа, представляющего собой по существу синхронный двигатель, основана на принципе самосинхронизации. Необходимую для работы датчиков Холла конфигурацию магнитного поля создают постоянные магниты, установленные на валу ротора. Датчики считывают угловую позицию вала и передают эту информацию схеме управления, которая обеспечивает своевременное отпирание и запирание силовых ключей электронного коммутатора обмоток статора. Подобные датчики положения ротора используются и в системах векторного управления двигателями переменного тока.
Расходомер.
| Рис.9 Датчик расхода |
Существуют различные методы измерения расхода с использованием цифровых датчиков Холла, но принцип у них, как правило, общий: каждое изменение магнитного потока через датчик соответствует некоторой порции жидкости или газа, прошедшей через трубопровод. В примере, показанном на рис. 9, магнитное поле создаётся постоянными магнитами, установленными на лопастях рабочего колеса. Рабочее колесо вращается потоком воды. Датчик выдаёт два импульса за оборот колеса.
Основные характеристики датчиков Холла
Линейные датчики. Полная шкала выхода соответствует диапазону выходных напряжений, в котором нелинейность не выходит из заданных пределов. Определяется как часть напряжения питания.
Диапазон измеряемой индукции, устанавливаемый изготовителем в гауссах или миллитеслах.
Чувствительность, определяемая как крутизна характеристики преобразования в мВ/Гс или мВ/мТл.
Погрешность линейности характеристики преобразования – отклонение статической характеристики преобразования датчика от идеальной прямой линии в заданном диапазоне давлений. Один из способов определения погрешности линейности состоит в использовании метода наименьших квадратов, который математически обеспечивает получение прямой линии наилучшего приближения к точкам данных. Указывается в процентах от полной шкалы.
Напряжение нуля магнитного поля – значение выходного напряжения, соответствующее отсутствию магнитного поля.
Температурный дрейф нуля – изменение напряжения нуля, вызванное изменением температуры. Указывается в %/°С от напряжения нуля, соответствующего 25°С.
Температурный дрейф чувствительности – изменение чувствительности, вызванное изменением температуры. Указывается в %/°С от напряжения полной шкалы, соответствующего 25°С.
Время отклика, определяется как время изменения выходного сигнала от 10% до 90% установившегося значения его приращения при скачкообразном изменении магнитного поля.
Полоса пропускания fS определяется по уровню снижения чувствительности на 3 дБ в режиме малого сигнала.
Логические датчики Индукция включения – значение индукции, при которой происходит переход выходного напряжения датчика от низкого к высокому уровню.
Индукция выключения – значение индукции, при которой происходит переход выходного напряжения датчика от высокого к низкому уровню.
Гистерезис – разность между индукциями включения и выключения.
Время переключения – определяется как время изменения выходного сигнала от 10% до 90% его установившегося значения при скачкообразном изменении индукции. Сертифицируется отдельно для нарастания и спада магнитного поля. Для двухвыводных датчиков сертифицируется ток потребления при низкой индукции (Н) и при высокой (В).
Прочитано здесь: http://www.gearmotor.ru/holl.htm
Эта запись была опубликована 11.02.2010в 2:23 пп. В рубриках: Контроль положения, Предложенные студентами, МГСУ. Вы можете следить за ответами к этой записи через RSS 2.0. Вы можете оставить свой отзыв или трекбек со своего сайта.
Руководство по применению датчиков Холла и герконов
Добавлено 2 октября 2017 в 16:05
В предыдущей статье обсуждалась важность фокусирования на всей конструкции системы, а не на конкретном компоненте магнитной схемы. В тех системах, где требуются специальные датчики, необходимо, чтобы конструктор определил факторы окружающей среды, механического воздействия, электрические и магнитные параметры всей системы, чтобы можно было выбрать датчик, который соответствует этим условиям эксплуатации.
Как уже упоминалось в первой статье, между разработчиком, производителем и потребителем должна поддерживаться четкая и прямая связь, чтобы рабочие требования ко всем датчикам и системе в целом могли быть четко определены и были понятны всем вовлеченным сторонам. Без такой постоянной связи мало шансов, что будет спроектирована надежная система, которая будет функционировать как нужно. И, наоборот, при хорошей коммуникации в проектной группе на протяжении всего процесса может быть разработана надежная схема, которая соответствует всем известным требованиям.
В этой статье будет рассмотрен вопрос, как выбрать технологии магнитных датчиков для аналоговых и цифровых приложений. В ней также определяются и описываются преимущества герконовых датчиков и датчиков Холла с приведением примеров приложений с микропроцессорным управлением, которые используют эти датчики.
Цифровые датчики: высокая надежность в дискретных приложениях
Во многих приложениях используется цифровой выход для определения, находится ли объект в определенной позиции. Например, датчик может быть использован для проверки наличия защитного ограждения на механизме. Если ограждение находится на своем месте, машина работает. Если же это не так, машина работать не будет. В этом типе дискретного приложения требуется цифровой выход. В приложениях с магнитными датчиками исключительную надежность обеспечивают следующие цифровые датчики:
Герконовые датчики: преимущества и применение
Герконовый датчик представляет собой электрический ключ, который для работы не требует питания, в отличие от интегральной схемы. Выводы заводятся в герметизированную стеклянную колбу, в которой находятся контактные пластины. В результате ключ в герконе обладает высокой надежностью, поскольку он не подвержен влиянию влаги или других факторов окружающей среды. Поэтому контакты не будут окисляться и с нагрузками логического уровня будут продолжать работать в течение миллионов циклов.
Герконовые датчики очень популярны среди приложения с питанием от батареи. Они используются в автомобильных составляющих безопасности, например, обнаружение защелкивания застежки ремня безопасности и обнаружение столкновения. Поскольку герконы могут переключать нагрузки и постоянного, и переменного напряжения, их часто выбирают для цифровых приложений типа «вкл/выкл», например, детектирование закрытия/открытия двери в системах безопасности и в бытовой технике.
Например, дверь холодильника использует геркон для определения закрытия двери. Магнит крепится к двери, а герконовый датчик закрепляется на неподвижной раме, скрытой за внешней стенкой холодильника. Когда дверь открыта, герконовый датчик не может обнаружить магнитное поле, что заставляет включиться светодиодную лампу. Когда дверь закрывается, датчик обнаруживает соответствующее магнитное поле, и светодиод выключается. В этом приложении микроконтроллер внутри блока управления получает сигнал от геркона, а затем включает или выключает светодиод.
 Рисунок 1 – Геркон в двери холодильника используется для включения и выключения светодиода
Рисунок 1 – Геркон в двери холодильника используется для включения и выключения светодиодаЦифровые датчики Холла: преимущества и применение
Цифровые датчики Холла используют полупроводниковые приборы и их выходное напряжение изменяется в зависимости от изменения магнитного поля. Эти датчики объединяют в семе чувствительный элемент с эффектом Холла и электрическую схему, обеспечивающую цифровой выходной сигнал типа «вкл/выкл», что соответствует изменению магнитного поля без использования каких-либо движущихся частей. Использование датчика на основе эффекта Холла ограничено приложениями с низкими постоянными напряжением и током. В отличие от геркона, устройство на основе эффекта Холла содержит в себе активную схему, поэтому оно потребляет небольшое количество тока в любое время.
Цифровые датчики Холла обеспечивают высокую надежность и для точных требований к измерениям могут быть запрограммированы на активацию при заданной величине магнитного поля.
Эти датчики очень популярны в высокоскоростных измерительных схемах таких бытовых машин, как стиральные машины и сушилки. В этом применении вращающийся 16-полюсный кольцевой магнит активирует чип датчика Холла при каждом прохождении красного (северный полюс) сегмента и деактивирует его при каждом прохождении белого (южный полюс) сегмента, что дает очень точный сигнал, соответствующий скорости. Цифровые датчики Холла особенно полезны в автомобильных приложениях безопасности, таких как определение защелкивания застежки ремня безопасности и определение скорости зубчатой передачи.
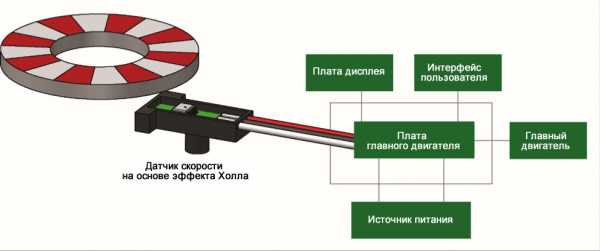 Рисунок 2 – Схема применения датчика Холла для измерения скорости
Рисунок 2 – Схема применения датчика Холла для измерения скоростиАналоговые/пропорциональные датчики для повышения стабильности и точности
Аналоговые измерительные приложения позволяют конечному пользователю мгновенно получать обратную связь о положении магнита. Аналоговый датчик Холла обладает высокоточным выходным сигналом с высоким разрешением.
Ранее аналоговые датчики Холла измеряли у магнитов плотность потока и в значительной степени зависели от внешней температуры. Так как в последние годы аналоговые технологии эффекта Холла развивались, теперь, вместо традиционной амплитуды поля, микросхема с датчиком Холла теперь измеряет угол поля, делая его намного менее чувствительным к изменениям температуры. Это улучшение позволяет датчику обеспечивать более стабильный аналоговый выходной сигнал в широком диапазоне температур.
Рассмотрим два типа датчиков Холла, которые могут быть выбраны для аналоговых измерительных схем:
Поворотный датчик Холла: преимущества и применение
Этот полупроводниковый датчик изменяет выходное напряжение при изменении магнитного поля. Он сочетает в себе измерительный элемента на основе эффекта Холла и электрическую схему, обеспечивающую аналоговый выходной сигнал, который соответствует изменению вращающегося магнитного поля без использования каких-либо движущихся частей. Этот датчик предлагает два варианта выходного сигнала: аналоговый или широтно-импульсно-модулированный (ШИМ). Устройство программируется таким образом, чтобы инженер мог связать определенное выходное напряжение или ШИМ сигнал с точной степенью поворота. При повороте до 360° доступны несколько точек программирования. Каждая программируемая точка представляет собой напряжение или ШИМ сигнал, который соответствует заданному углу магнитного поля. Это приводит к получению выходного сигнала, пропорционального углу поворота.
В отличие от механического и резистивно-плёночного поворотных устройств поворотный датчик Холла не испытывает механического износа или изменения значений сопротивления. Кроме того, он очень стабилен при нормальных рабочих температурах вплоть до +105°C. Результаты измерения угла поворота в диапазоне 0°–360° точно калибруются в соответствующем диапазоне выходного постоянного напряжения 0,5В–4,5В или коэффициента заполнения ШИМ сигнала 10–90%.
Поворотные датчики Холла становятся очень популярными для замены механических резистивно-пленочных потенциометров. Они используются в автомобильных и внедорожных приложениях, таких как определение положения клапана EGR в двигателях. Эти датчики также могут использоваться для определения положения поворотных ручек в приборах и бытовой технике.
 Рисунок 3 – Поворотный датчик Холла, используемый в поворотной ручке стиральной машины
Рисунок 3 – Поворотный датчик Холла, используемый в поворотной ручке стиральной машиныЛинейный датчик Холла: преимущества и применение
Линейные датчики Холла похожи на поворотные датчики Холла, за исключением того, что они измеряют не угловое, а линейное движение магнитного поля. Датчик Холла программируется для выдачи заданного напряжения, пропорционального заданному расстоянию. Типы выходного сигнала у него такие же, как и у поворотного датчика Холла. Датчик измеряет линейное перемещение и относительный угол потока магнитного привода на расстоянии до 30 мм на каждую микросхему с датчиком Холла. Это дает в результате выходной сигнал, точно пропорциональный перемещению датчика.
Перед программированием выходных напряжений или значений ШИМ-сигнала, соответствующих относительному значению магнитного поля от магнита на приводе, датчик и привод могут быть помещены на место окончательного монтажа в устройстве, чтобы в процессе программирования учесть все магнитные воздействия от близлежащего окружения. Это позволит инженеру отрегулировать выходной сигнал датчика, поскольку в процессе программирования будут учтены любые шунтирующие, механические воздействия и воздействия посторонних магнитных полей.
Линейные датчики Холла часто используются в качестве датчиков контроля уровня жидкости. В этом применении датчик определяет положение движущегося поплавка с прикрепленным магнитом. Линейные датчики также полезны в более сложных конструкциях, таких как автомобильная коробка передач.
Заключение
Данная статья объясняет методологию разработки оптимальной магнитной цепи, для которой требуется настраиваемый датчик. Всегда важно определять параметры проекта всей системы до начала процесса проектирования.
В схемах, где требуются специальные датчики, например, приложения со сложным микропроцессорным управлением, герконовые датчики и датчики Холла обеспечивают бесконтактную технологию, которая является высоко повторяемой и надежной. Цифровой выходной сигнал доступен и у герконов, и у датчиков Холла, и эта технология широко используется в бытовой и автомобильной технике. Аналогично, оба этих типа датчиков могут быть разработаны для использования в аналоговых приложениях, где требуется высокий уровень точности и стабильности.
Оригинал статьи:








"Питер - АТ"
ИНН 780703320484
ОГРНИП 313784720500453
Новости
-
Отзывы о Питер-АТ
Спасибо нашим клиентам за отзывы о нас:
-
Акция на ремонт вариаторных трансмиссий

-
Замена масла в двигателе в подарок
При замене масла в АКПП замена масла в двигателе бесплатно! -
Клиенту на заметку
-
Контрактные АКПП в СПб
