Угол поворота 2 датчика холла
Датчик угла поворота на основе эффекта Холла, измеряющий вращения на 360 градусов
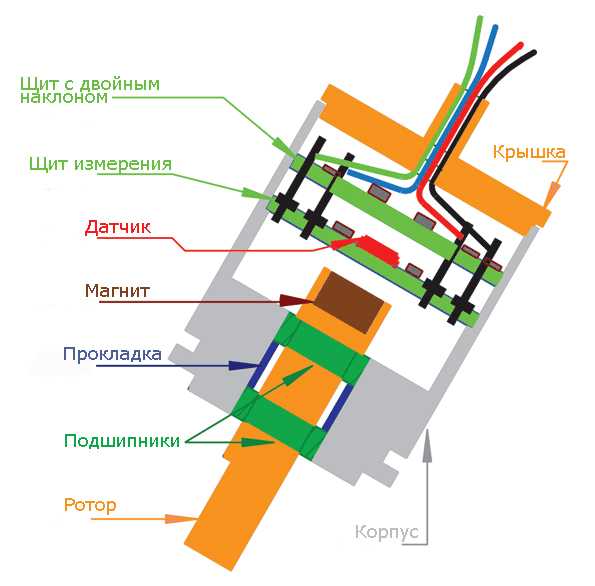
Инженеры, которым необходимо измерять угол поворота антенны, направление протекания жидкостей, вращения роботизированных рук и других механизмов, теперь могут использовать датчик угла поворота Two-Pi hallpot, от Elweco Inc. Он может измерять угол поворота вала. Датчик может измерять углы до 360 0 и движение со скоростью до 5000 оборотов в минуту, а генерируемый сигнал имеет линейную зависимость от вращения. Датчик генерирует две одновременные линейные реакции с противоположными наклонами, что позволяет выбрать инженерам предпочтительное направление вращения, а затем использовать любой наклон. Данное устройство использует бесконтактные магнитные датчики Холла, что исключает трение между вращающимися частями и, соответственно, значительно продлевает срок службы.
Датчики не требуют каких-либо дополнительных аппаратных средств для получения или декодирования сигналов линейных измерений, а также управляющих сигналов, что исключает необходимость программного обеспечения. Поскольку устройство может генерировать два различных сигнала наклона, инженеры могут подключать данный датчик непосредственно к системе управления без использования дополнительных преобразующих элементов.
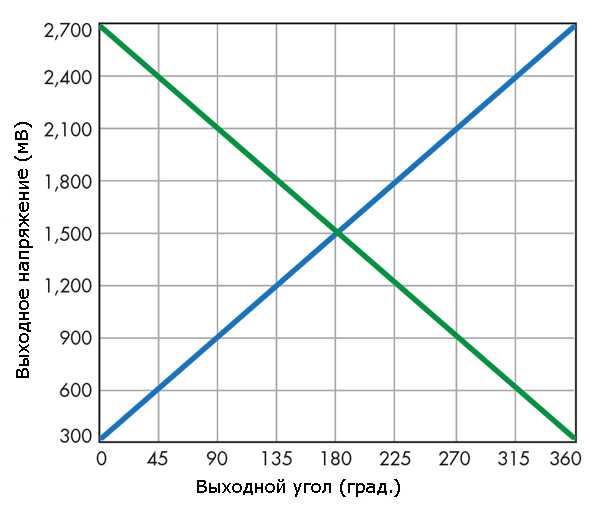
На графике ниже показана зависимость выходных сигналов от угла поворота. Для любого направления вращения доступен положительный и отрицательный наклон, что позволяет пользователю подобрать наиболее подходящий тип сигнала для его устройства.
Датчик использует два шариковых подшипника ABEC Class-5 на каждом валу ротора для подключения к измеряемому устройству. Датчик поставляется в трех различных конфигурациях для стандартных размеров и форм, поэтому никакого специального оборудования не нужно для их монтажа, что делает их очень удобными для внедрения в новые и при модернизации старых установок.
Устройство имеет напряжение питания от 4,5 В до 5,5 В постоянного тока при токе всего в 12 мА. Для их питания вполне подходят нерегулируемые источники питания. Выходной сигнал лежит в пределах от 300 мВ до 2700 мВ при температурном режиме от -20 0С до 85 0С и относительной влажности в 95%.
Датчики Холла для бесколлекторного двигателя: возвращение квадратурных энкодеров
Это уже третья статья, рассказывающая о квадратурных декодерах, на сей раз с применением к управлению бесколлекторными двигателями. Задача: есть обычный китайский бесколлекторник, нужно его подключить к контроллеру Copley Controls 503. В отличие от копеечных коптерных контроллеров, 503й хочет сигнал с датчиков холла, которых на движке нет. Давайте разбираться, для чего нужны датчики и как их ставить.
Ликбез: принцип работы бесколлекторного двигателя
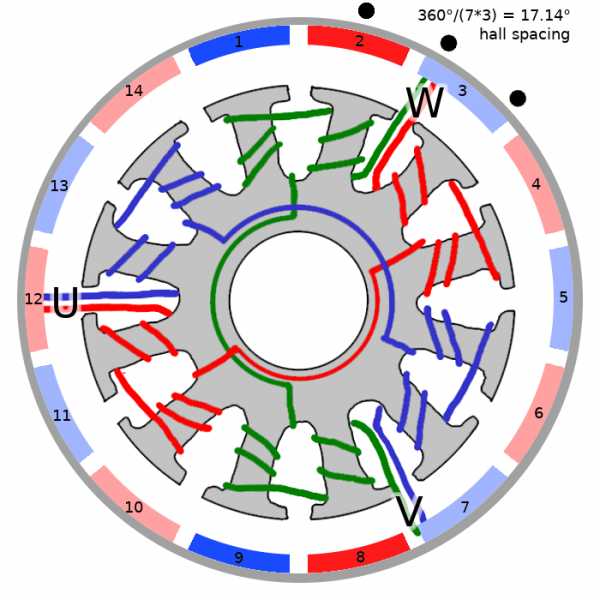
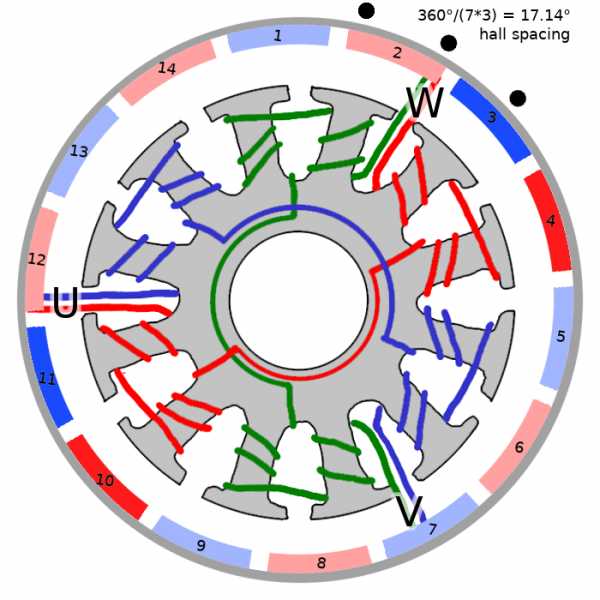
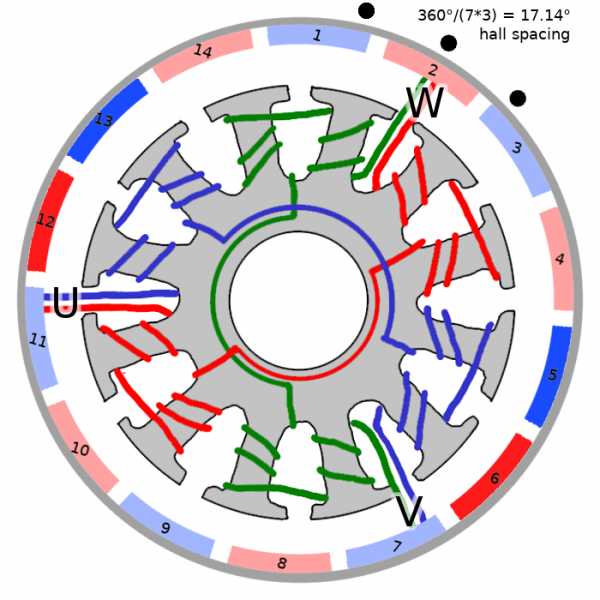
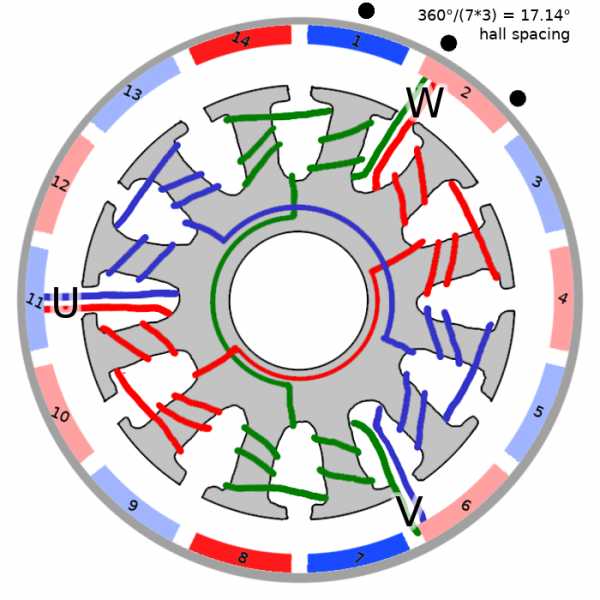
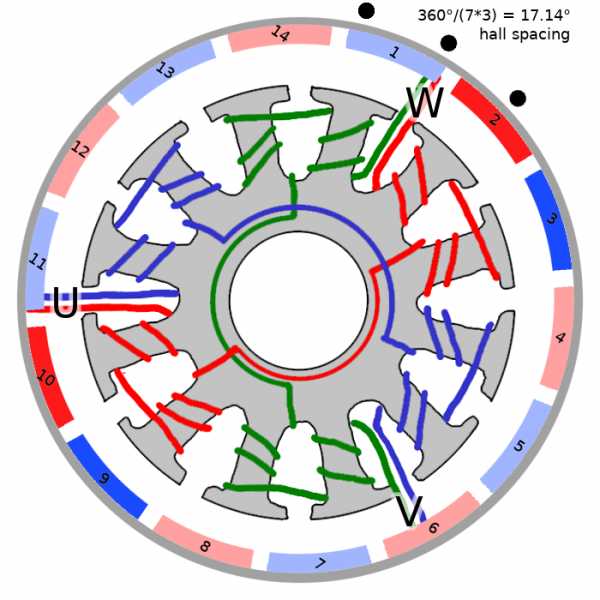
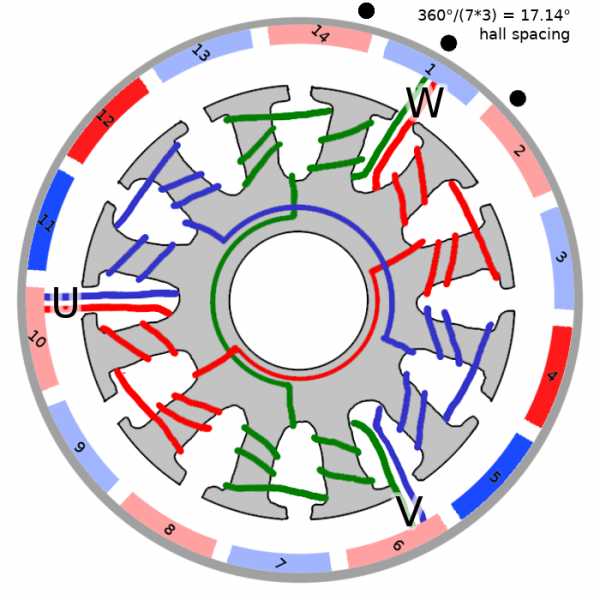
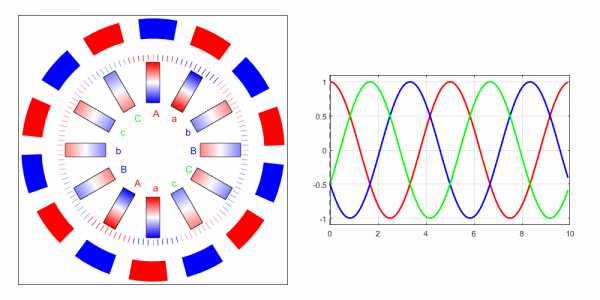
В качестве иллюстрации я возьму очень распространённый двигатель с двенадцатью катушками в статоре и четырнадцатью магнитами в роторе. Вариантов намотки и количества катушек/магнитов довольно много, но суть всегда остаётся одной и той же. Вот фотография моего экземпляра с двух сторон, отлично видны и катушки, и магниты в роторе: 
| Угол поворота ротора | U | V | W |
| 0° | n.c. | + | - |
| Угол поворота ротора | U | V | W |
| 8.57° | + | n.c. | - |
| Угол поворота ротора | U | V | W |
| 17.14° | + | - | n.c. |
| Угол поворота ротора | U | V | W |
| 25.71° | n.c. | - | + |
| Угол поворота ротора | U | V | W |
| 34.29° | - | n.c. | + |
| Угол поворота ротора | U | V | W |
| 42.85° | - | + | n.c. |
| Угол поворота ротора | U | V | W |
| 0° | n.c. | + | - |
| 8.57° | + | n.c. | - |
| 17.14° | + | - | n.c. |
| 25.71° | n.c. | - | + |
| 34.29° | - | n.c. | + |
| 42.86° | - | + | n.c. |
Датчики Холла
Теперь давайте поставим три датчика холла в те чёрные точки, обозначенные на схеме. Давайте договоримся, что датчик выдаёт логическую единицу, когда он находится напротив красного магнита. Всего существует шесть (сюрприз!) возможных состояний трёх датчиков: 23 — 2. Всего возможных состояний 8, но в силу расстояния между датчиками они не могут все втроём быть в логическом нуле или в логической единице: 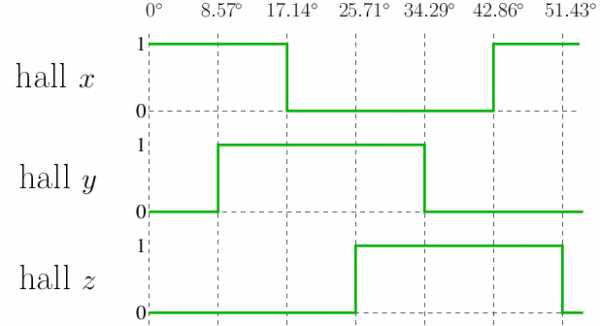
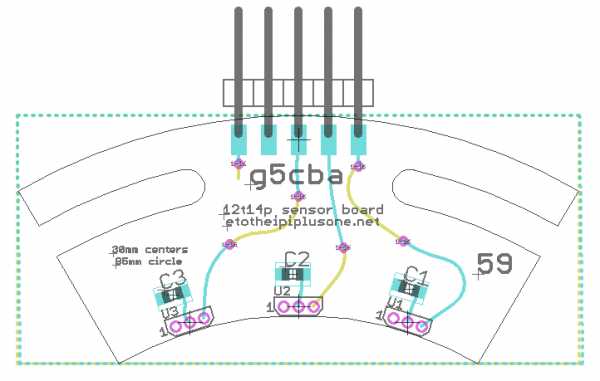
Для размещения датчиков я использовал вот такую платку, дизайн которой взял тут. По ссылке лежит проект eagle, так что я просто заказал у китайцев сразу много подобных платок:
Постойте, но ведь это очень похоже на квадратурный сигнал с обычного инкрементального энкодера!
Ещё бы! Единственная разница, что инкрементальные энкодеры дают два сигнала, сдвинутые друг относительно друга на 90°, а у нас три сигнала, сдвинутые на 120°. Что будет, если завести любые два из них на обычный квадратурный декодер, например, той же самой синей таблетки? Мы получим возможность определять положение вала с точностью до четырёх отсчётов на одну седьмую оборота, или 28 отсчётов на оборот. Если вы не поняли, о чём я, прочтите принцип работы квадратурного декодера в первой статье. Я долго думал, как же мне использовать все три сигнала, ведь у нас происходит шесть событий на одну седьмую оборота, мы должны иметь возможность получить 42 отсчёта на оборот. В итоге решил пойти грубой силой, так как синяя таблетка имеет кучу аппаратных квадратурных декодеров, поэтому я решил в ней завести три счётчика: 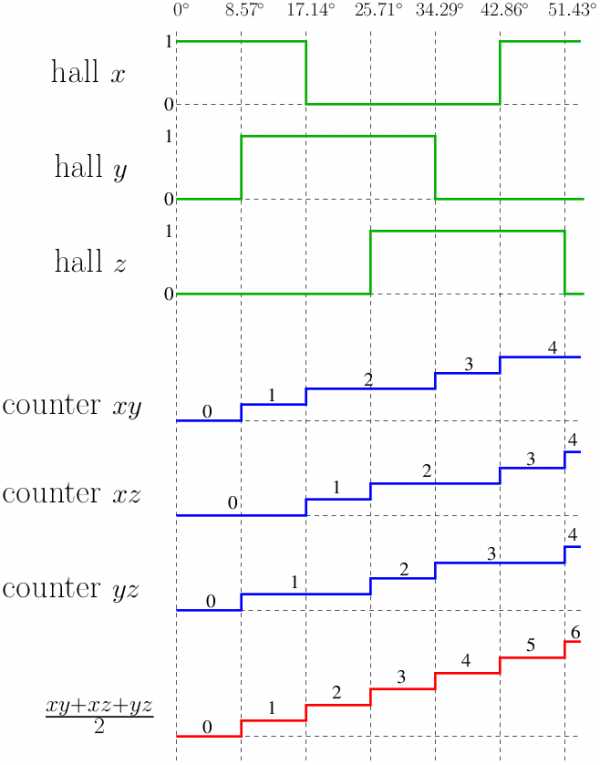
А почему на двигателе сразу нет датчиков?
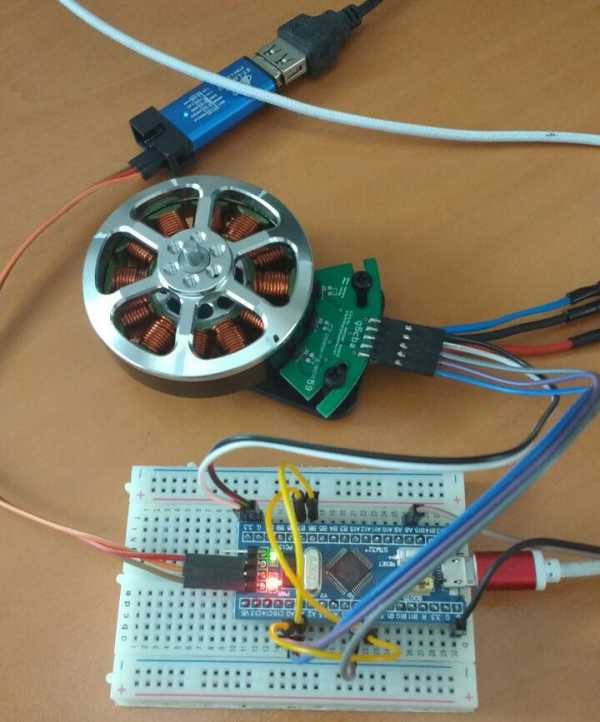
В некоторых приложениях (например, для коптеров) все эти заморочки не нужны. Контроллеры пытаются угадать происходящее с ротором по току в катушках. С одной стороны, это меньше заморочек, но с другой стороны, иногда приводит к проблемам с моментом старта двигателя, поэтому слабоприменимо, например, в робототехнике, где нужны околонулевые скорости. Давайте попробуем запитать наш движок от обычного китайского коптерного ESC (electronic speed controller). Мой контроллер хочет на вход PPM сигнал: это импульс с частотой 50Гц, длина импульса задаёт обороты: 1мс — останов, 2мс — максимально возможные обороты (считается как KV двигателя * напряжение).Вот здесь я выложил исходный код и кубовские файлы для синей таблетки. Таймер 1 генерирует PWM для ESC, таймеры 2,3,4 считают соответствующие квадратурные сигналы. Поскольку в прошлой статье я крайне подробно расписал, где и что кликать, то здесь только даю ссылку на исходный код.
На вход моему ESC я даю пилообразное задание скорости, посмотрим, как он его отработает. Вывод синей таблетки лежит тут, а код, который рисует график, тут.
Поскольку у меня двигатель имеет номинал 400KV, а питание я подал 10В, то максимальные обороты должны быть в районе 4000 об/мин = 419 рад/с. Ну а вот и график подоспел: 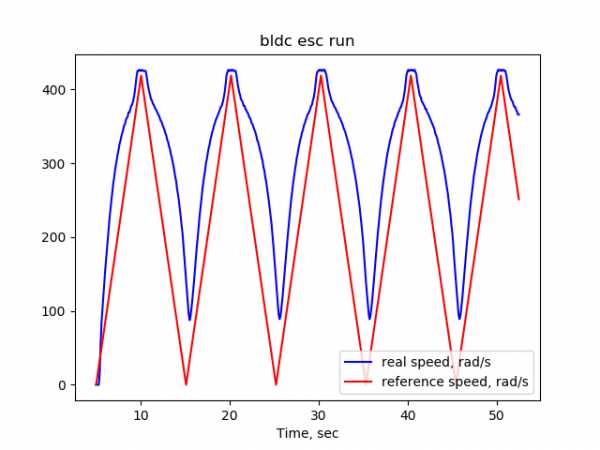
Подводим итог
Я провёл детство в обнимку с этой книжкой, но раскурить принципы работы бесколлекторников довелось только сейчас. 
Update: красивая анимация от Arastas:
- stm32
- blink++
- ардуино головного мозга
Гальваномагнитные эффекты
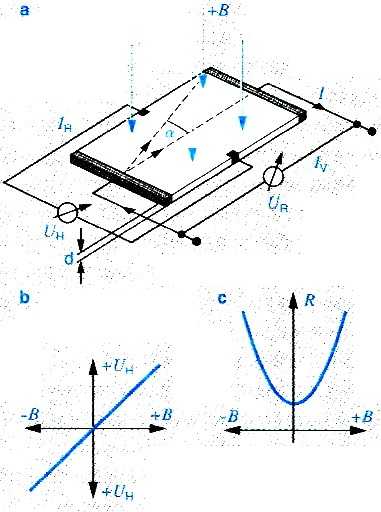
Рис. Гальваномагнитные эффекты:
- а Схема
- b Процесс создания напряжения Холла UH
- с Рост сопротивления пластинки R (эффект Гауса)
- В Магнитная индукция
- I Ток пластинки
- IН Ток Холла
- Iv Питающий ток
- UR Продольное напряжение
- а Отклонение электронов за счет магнитного поля
Одновременно продольное сопротивление пластинки увеличивается независимо от направления поля по параболе (эффект Гаусса, магниторезистор).
Коэффициент RH , являющийся определяющим для измерительной чувствительности пластинки, при использовании кремния сравнительно мал. Поскольку толщину пластинки d можно уменьшить с помощью диффузионной технологии, напряжение Холла опять достигнет величины, технически пригодной для использования. Применяя кремний в качестве основного материала, одновременно на пластинку можно интегрировать переключатель для подготовки сигнала, благодаря чему производство таких датчиков может стать очень выгодным.
В отношении измерительной чувствительности и температурного режима кремний является далеко не самым подходящим полупроводниковым материалом для производства датчиков Холла. Лучшими характеристиками обладают, например, полупроводники III-V, такие как арсенид галлия или антимонид индия.
Переключатель Холла
В самом простом случае напряжение Холла подается на пороговую электронику, интегрированную в датчик (Schmitt-Trigger), которая производит цифровой выходной сигнал. Если магнитная индукция В существующая на датчике, находится ниже определенного нижнего порогового параметра, то выходное значение соответствует, например, логическому «О» («release»-состояние); если оно выше определенного верхнего порогового параметра, то выходной сигнал соответствует логической «1» («operate»-состояние). Поскольку такой процесс гарантирован для всего диапазона рабочей температуры и для всех экземпляров одного типа, оба пороговых значения относительно далеки друг от друга. Поэтому для включения переключателя Холла требуется значительный индукционный ход АВ.
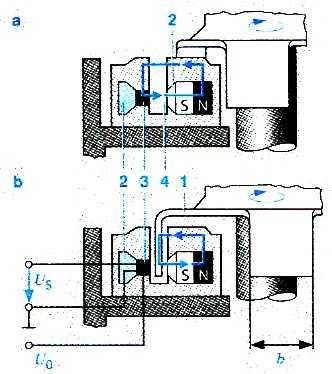
Рис. Заграждения Холла:
- Заглушка шириной b
- Магнитомягкие проводники
- Холл-IC
- Воздушный зазор
- а Беспрепятственный Магнитный поток
- b короткозамкнутый Магнитный поток
- U0 Питающее напряжение
- Us Напряжение датчика
Такие датчики, производимые еще по биполярной технологии, использовались, например, в заграждениях Холла, которые были встроены в корпус распределителя зажигания, приводящегося в движение распределительным валом. Это заграждение Холла кроме датчика имеет еще постоянные магниты и магнитомягкие проводники. Магнитный контур имеет U-образную или вилкообразную форму, так что благодаря открытому концу можно использовать замыкатель из мягкомагнитного материала, который попеременно экранирует или разблокирует магниты, благодаря чему датчик Холла выполняет переключения между состояниями operate и release. Следующий способ применения — в цифровом датчике угла поворота рулевого колеса LWS1.
Датчики Холла такого типа достаточно недорогие, однако хороши только для переключающего режима работы и слишком неточны для анализа аналоговых величин.
Датчики Холла, работающие по принципу «Spinning Current»
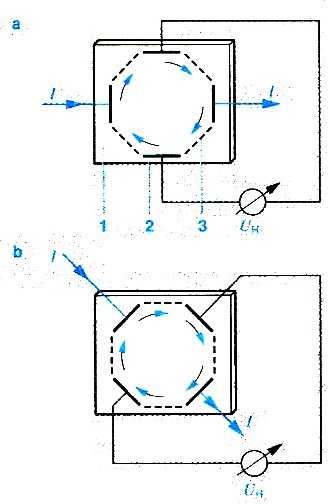
Рис. Датчик Холла, работающий по принципу «Spinning-Current»:
- Полупроводниковая пластинка
- Активный Электрод
- Пассивный Электрод
- а Фаза поворота ф1
- b Фаза поворота ф2 = ф1 + 45°
- I Ток питания
- UH Напряжение Холла
Недостатком в простом кремниевом датчике Холла является одновременная чувствительность к механическим напряжениям (пьезоэффект), которые неизбежны при сборке и приводят к нежелательным температурным смещениям характеристик. Используя принцип «Spinning Current», в сочетании с переходом к технологии CMOS, этот недостаток удалось преодолеть. Хотя пьезоэффект и появляется, он компенсируется временным усреднением сигнала, поскольку появляется при быстрой, регулируемой электронным способом смене электродов (ротации) с различными знаками. Если есть необходимость в экономии трудозатрат на изготовление сложной электроники для переключения электродов, можно интегрировать несколько датчиков Холла (два, четыре или восемь) с соответственно разными направлениями тока, расположив их близко друг к другу, а их сигналы суммировать в контексте сообщения. Принцип Hall-ICs очень хорошо подходит для использования в аналоговых датчиках. Температурные воздействия, оказывающие частично отрицательное влияние на измерительную чувствительность не уменьшаются за счет этого.
Такие интегрированные Hall-ICs подходят преимущественно для измерения малых отрезков, в ходе которого они считывают изменяющиеся показания напряженности поля аппроксимирующего постоянного магнита (например, датчик усилия iBolt, он считывает показания веса пассажира на переднем сидении для оптимального срабатывания подушки безопасности). Подобные хорошие результаты до сих пор были получены только благодаря использованию отдельных элементов Холла, например, сочетания соединений III-V с гибридным последовательно включенным усилителем (например, датчики ускорения Холла).
Дифференциальные датчики Холла
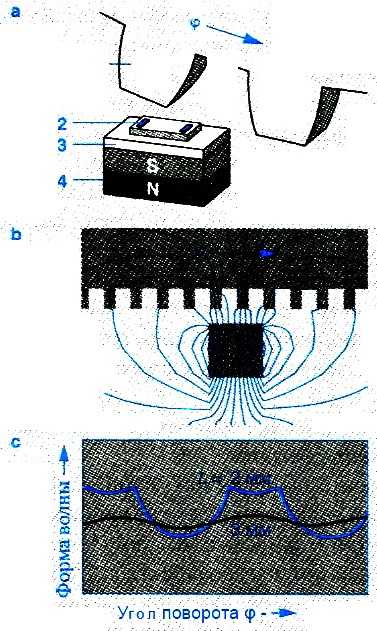
Рис. Дифференциальный датчик Холла:
- Зубчатый венец
- Дифференциальный IС Холла
- Гомогенизирующая пластина (мягкое железо)
- Постоянный магнит
- а Конструкция
- b Движение поля (1,5-кратное инкрементное расстояние)
- с Движение сигнала для ширина воздушного зазора L
В двойном датчике Холла (дифференциальный датчик Холла) на определенном расстоянии на чипе расположены две полноценные системы Холла. Электроника определяет разницу обоих напряжений Холла. Эти датчики обладают преимуществом, которое состоит в том, что их выходной сигнал не зависит от абсолютного значения магнитной напряженности поля, и они определяют только пространственные изменения магнитной индукции как: дифференциальный датчик, т.е. градиенты поля (поэтому они также часто называются градиентными зондами).
Такие датчики в большинстве случаев используются для измерения числа оборотов, поскольку полярность их выходного сигнала не зависит от воздушного зазора между ротором и датчиком. Если для сканирования зубчатого колеса используется только один простой датчик Холла, он не может распознать, изменяется ли магнитный поток за счет продолжения вращения зубчатого колеса или за счет изменения расстояния (например, вибраций, монтажных допусков). Это приводит к серьезным ошибкам сканирования, поскольку сигнал должен подводиться к детектору порогового значения. У дифференциальных датчиков принцип работы другой. Они оценивают только разницу сигналов двух расположенных на нужном расстоянии друг от друга датчиков Холла. Если разница сигналов, например, положительная, расстояние между зубчатым колесом и датчиком можно изменять как угодно; разница будет оставаться положительной, если, даже в сумме она станет меньше. Знак может измениться только в случае продолжения вращения ротора. Последовательно подключенный детектор порогового значения также не имеет проблем с определением изменения расстояния и вращением.
Для достижения максимального выходного сигнала выбирают расстояние между двумя — зачастую установленных по краям (продольно) чипа — датчиков Холла, составляющее около половины инкрементного расстояния (расстояние между зубьями). Этот максимум сигнала очень широкий, т.е. он покрывает широкий диапазон вибрации инкрементного расстояния.
Большие отклонения от инкрементного расстояния требуют более сложного изменения конструкции датчика. В качестве градиентного зонда датчик нельзя устанавливать в произвольном положении, он должен максимально точно устанавливаться в направлении вращения инкрементного ротора.
Угловые датчики Холла в диапазоне до 180°
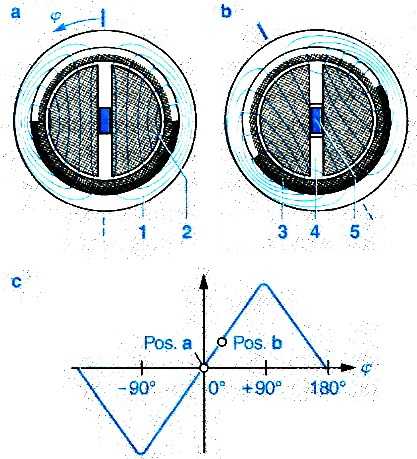
Рис. Аналоговый угловой датчик Холла (мобильный магнит). Линейная графическая характеристика угла до 180°:
- Обратное замыкание железа (мягкая сталь)
- Статор (мягкая сталь)
- Ротор (перманентный магнит)
- Воздушный зазор
- Датчик Холла
- а Положение а
- b Положение b
- с Выходной сигнал
- Ф Угол поворота
С помощью вращающегося магнитного кольца («Movable Magnet»), а также нескольких стационарных магнитомягких проводников можно получить прямой линейный выходной сигнал для углов большего диапазона. При этом двухфазное поле магнитного кольца проводится через датчик Холла, расположенный между полукруглыми проводниками с прямой проводимостью. Эффективный магнитный поток, проходящий через датчик Холла, зависит от угла поворота ф.
Этот принцип применяется в датчиках педали газа.
Производную форму основного принципа «подвижного магнита» представляет собой угловой датчик Холла типа ARS1 с измерительным диапазоном 90°. Магнитный поток постоянно намагниченного диска полукруглой формы отводится к магниту через полюсный башмак, два проводника с прямой проводимостью и ферромагнитную ось. При этом в зависимости от положения угла поток проводится в большей или меньшей степени через оба проводника с прямой проводимостью, в магнитном пути которых также находится датчик Холла.
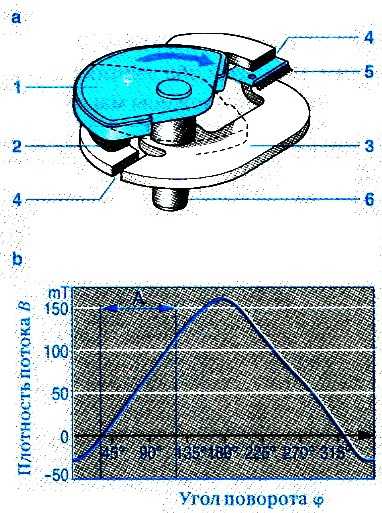
Рис. Угловой датчик Холла ASR 1 (мобильный магнит). Линейная графическая характеристика для угла до 90°:
- Роторный диск (постоянно магнитный)
- полюсный башмак
- Проводник с прямой проводимостью
- Воздушный зазор
- Датчик Холла
- Ось (магнитомягкий)
- а Конструкция
- b Графическая характеристика в рабочем диапазоне А
Таким образом магнитный диапазон позволяет достичь линейной характеристики. При упрощенном расположении в модели типа ARS2 отсутствуют магнитомягкие проводники. Здесь магнит движется по дуге окружности вокруг датчика Холла. Образующийся при этом синусоидальный ход графической характеристики только на относительно коротком отрезке имеет хорошую линейность. Если датчик Холла расположен немного за пределами середины круга, характеристика значительно отклоняется от синусоидальной формы.
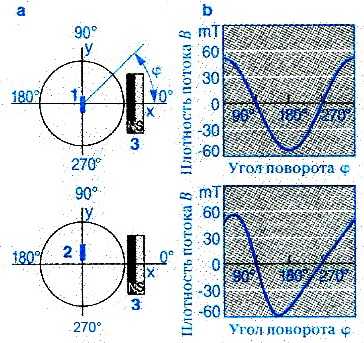
Рис. Угловой датчик Холла ASR2 (мобильный магнит). Линейный график для угла более 180°:
- IС Холла, расположен в центре круговой направляющей
- IС Холла, смещен от центра (линеаризация)
- Магнит
- а Принцип
- b Графическая характеристика
Она демонстрирует только короткий измерительный диапазон 90° и длинный отрезок с хорошей линейностью чуть более 180°. Недостатком является незначительное экранирование от посторонних полей, остающаяся зависимость от геометрических допусков магнитного контура и колебания интенсивности магнитного потока в постоянных магнитах в зависимости от температуры и старения.
Угловые датчики в диапазоне до 360°
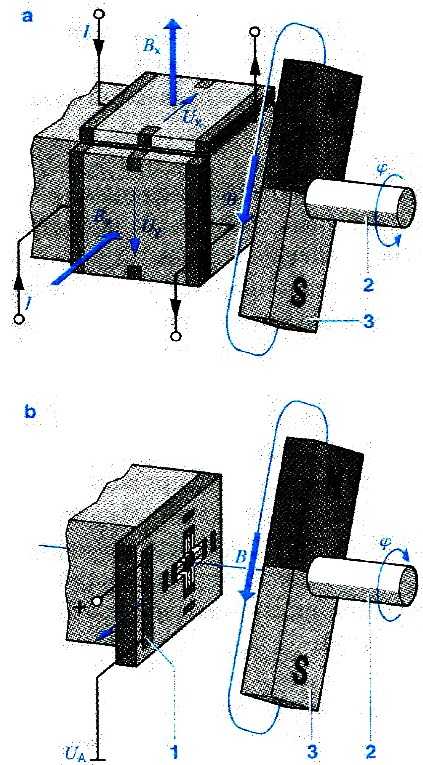
Рис. Аналоговый датчик Холла для угла 360°:
- Сигнальная электроника
- Распределительный вал
- Управляющий магнит
- а Конструкция дискретного IС Холла
- b Конструкция из планарного интегрированного IС Холла
- В Индукция
- I Ток
- U Spannung
- UA Напряжение
- Ф Выходное напряжение
Аналоговый угловой датчик с диапазоном измерений до 360° означает, что постоянный магнит вращается, как изображено, над ортогональным расположением двух датчиков Холла. Чтобы не слишком зависеть от допуска положения магнита, магнит должен быть достаточно большим. При этом оба датчика Холла должны быть расположены максимально близко друг к другу в части того же направления постоянного магнитного поля рассеяния, которое отображает положение угла ф постоянного магнита. Они направлены под прямым углом относительно друг друга и параллельно оси вращения постоянного магнита, таким образом считывают показания компонентов х- и у- вектора напряженности поля В, вращающегося над ними:
Uh2 = Ux = B*sinф Uh3 = Uy = B*cosф
На основании этих двух сигналов можно рассчитать угол ф по тригонометрическому соотношению ф = arctg (Uh2/Uh3) в чипе для обработки данных, который можно приобрести в продаже и с помощью которого оцифровывается сигнал.
Такое расположение датчика Холла позволяет осуществлять интеграцию с вертикальными устройствами Холла (Vertical Hall Devices) в таком виде, как изображено на рисунке, так, чтобы площадь сенсорного чипа располагалась вертикально по отношению к оси вращения, а датчик, в отличие от обычного, планарного датчика Холла, обладал чувствительностью в плоскости вращения. Монолитная интеграция гарантирует высокую точность необходимого расположения под прямым углом, а также желаемую компактную конструкцию обеих систем Холла. Компания «Sentron» («Melexis»), Швейцария работает над созданием таких датчиков и в будущем представит их на рынке. Угловые датчики такого типа рассматривались, например, для реализации пусковых систем мгновенного старта, в которых абсолютного положение вращения распределительного вала должно измеряться в диапазоне 360°.
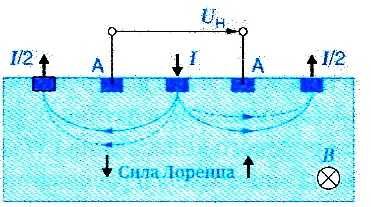
Рис. Вертикальное устройство Холла в поперечном разрезе: Потоки I, направленные внутрь чипа, отклоняются за счет сил Лоренца по причине магнитной индукции В, направленной параллельно поверхности чипа, таким образом, что между поверхностными электродами А и А’ снимается напряжение Холла UH
В принципе, существует еще один способ, с помощью которого обычному планарному датчику Холла (дополнительно) можно придать чувствительность в плоскости вращения. При методе, используемом компанией Melexis-Sentron (например, тип 2SA-10) для измерения компонентов поля, появляющиеся в плоскости вращения Вх и Ву на одинаковом чипе вместе с четырьмя датчиками Холла, смещенными по отношению друг к другу на 90°, располагаются на узкой окружности. При этом каждый датчик состоит по указанным выше причинам из пары элементов Холла, повернутых на 90°. После завершения изготовления чипа на его поверхность устанавливается круглый диск из магнитомягкого материала с диаметром ок. 200 мкм, как: показано на рисунке таким образом, чтобы датчики Холла четко попали под край диска.
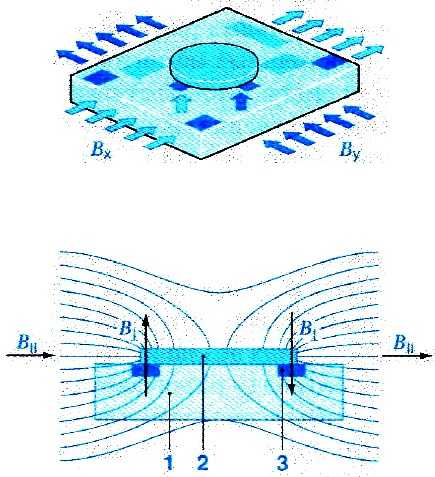
Рис. Комплект 4×2 планарных датчиков Холла с IMC: IMC — интегрированный магнитный концентратор. Элементы Холла расположены на чипе попарно под углом 90° друг к другу прямо под краем маленькой ферромагнитной шайбы. Благодаря их присутствию магнитная индукция B2 параллельная поверхности чипа преобразуется в магнитную индукцию В1, перпендикулярную его поверхности, для того, чтобы быть распознанной датчиками Холла
На основании их высокой относительной магнитной проницательности этот диск действует как: концентратор потока (IMC, встроенный магнитный концентратор) и вынуждает все линии поля вертикально входить в его поверхность. За счет этого линии поля, проходящие горизонтально без концентратора потока (в плоскости вращения) в месте расположения датчиков Холла., вынужденно направляются в вертикальном направлении (вне плоскости вращения) и поэтому могут модулировать элементы Холла. Поскольку элементы, расположенные диагонально друг к другу, «видят» противоположные направления поля, то для. считывания одного компонента поля будет определяться разница обеих противоположных одинаковых напряжений Холла. Одновременно за счет этого существующие вертикальные компоненты Bz взаимно устраняют свой эффект.
За счет дополнительного анализа суммарных сигналов элементов, расположенных по диагонали друг к другу, можно определить также параметры вертикальных компонентов поля Bz; поскольку на них ферромагнитный диск не оказывает воздействия, и элементы из-за их расположения не утрачивают свою обычную чувствительность вне плоскости вращения. Таким образом, благодаря такому расположению индукционный вектор В, действующий в месте расположения датчика, считывается во всех трех компонентах. Электронные переключающие средства, необходимые для анализа сигнала, вкмочая цифровой сигнальный процессор, который используется для расчета функции арктангенса, базирующийся на базе микроконтроллера (DSP), и средства, необходимые для конечной корректировки датчика (EEPROM), могут быть интегрированы вместе с датчиком на тот же чип без особых затрат.
Для измерения углов до 360° достаточно, чтобы над чипом датчика с интегрированным анализатором сигнала вращался постоянный магнит, преимущественно круглой формы, намагниченный параллельно чипу. Поскольку угол поворота образуется с помощью функции арктангенса из соотношения обоих возникающих синусоидальных и косинусоидальных сигналов датчика, интенсивность магнитного поля, а стало быть, и старение магнита, его температурная зависимость и расстояние до поверхности датчика не играют никакой роли. Датчик определяет только положение вращения своего возбуждения.
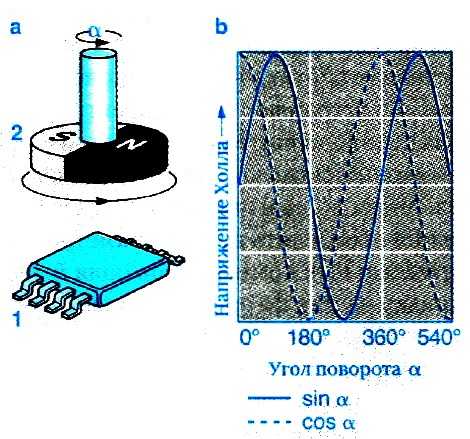
Рис. Измерение угла больше 360° с помощью четверного датчика Холла: Измерение угла в конце вала вращения с помощью четверного датчика Холла фирмы Melexis, в состав которого входит интегрированный концентратор потока (IMC) для переключения поля.
- а Измерительное устройство
- b Первичные выходные сигналы
Максимальная собственная погрешность датчика указана производителем в диапазоне 360° в размере + 2°. Ее можно уменьшить при калибровке датчика пользователем. В этом случае точность цифрового выхода составит 10 бит при разрешающей способности 12 бит. На основании времени обработки сигнала процессором кратчайшая частота дискретизации для частоты такта 20 МГц составляет 200 мкс. Выход сигнала, модулированный частотой пульсации, можно использовать при максимум 1 кГц. Для инициализации датчику требуется 15 мс. Стандартный параметр силы электромагнитного поля составляет ок. 40 mТ. При плотности потока выше 0,7 Т пластинка концентратора переходит в состояние насыщения.
Датчик преимущественно можно программировать также для любого диапазона измерений < 360°, при этом создается дополнительная эксплуатационная надежность за счет контроля выхода за пределы диапазона (использование, например, в качестве углового датчика в режиме работы педали газа FPM2.3).
Углы до 360° можно определять также с помощью самых простых устройств IС Холла (переключателей Холла), которые также используются для измерения числа оборотов (применение в датчиках угла поворота рулевого колеса типа LWS1). Для этого датчики Холла n располагаются однолинейно и равномерно на окружности для считывания n бит.
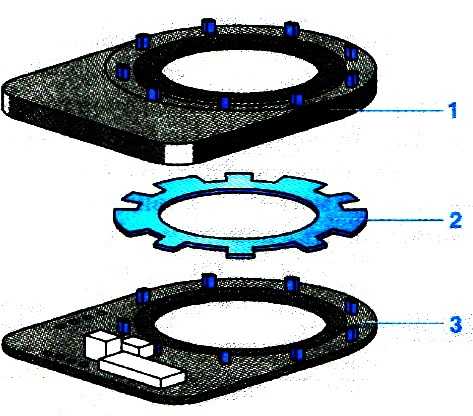
Рис. Цифровой угловой датчик Холла с n переключателями Холла. Измерение угла до 360° при равноудаленном расположении простых переключателей Холла по окружности:
- Корпус с постоянными магнитами
- Кодовый диск
- Проводниковая пластина с переключателями Холла
Магнитомягкий кодовый диск блокирует поле отдельных расположенных над ним постоянных магнитов или разблокирует его так, чтобы датчики Холла в случае продолжение вращения диска последовательно выдавали различные кодовые слова (серийный код). Во избежание серьезных ошибок в показаниях в моменты перехода целенаправленно используется код Грея. Код Грея разработан таким образом, что кодовые слова для двух соседних позиций — в отличие от двоичного кода — различаются только на 1 бит, чтобы возможный ошибочный показатель при переходе от одной позиции к следующей не превышал шаг угла.
Для создания датчика угла поворота рулевого колеса кодовый диск, например, соединяется с валом рулевого управления, а оставшаяся часть датчика с шасси. Сложность этого датчика состоит в том, что магнитомягкий кодовый диск должен монтироваться на подшипниках в плавающем состоянии, что приводит к выполнению сложного и объемного крепления с помощью гибких пластиковых манжет. Кодовый диск из соображений допусков по воздушному зазору между верхним и нижним дисками должен проходить впритирку. Соответствующее оптоэлектронное решение с использованием фотоячеек не является полностью удовлетворительным, поскольку в связи с чувствительностью элементов датчика к загрязнению нет возможности обеспечить их качественную защиту.
Многократное число оборотов можно считывать с помощью дополнительного простого 3-битного устройства, кодовый диск которого движется над понижающим редуктором. Разрешающая способность таких устройств зачастую не выше 2,5°.
(оцени первым)Датчики положения распределительного вала (датчики фазы) Холла
ОГЛАВЛЕНИЕ
- Конструкция и принцип действия
Применение
Распределительный вал редуцирован по сравнению с коленчатым валом на 1:2. Их положение отображает, находится ли поршень двигателя, движущийся к верхней мертвой точке, в такте сжатия или такте выпуска. Датчик фазы на распределительном вале (также называемый фазовым датчиком) передает эту информацию на блок управления. Она необходима, например, для систем зажигания с одноискровыми катушками и для последовательного впрыска топлива (SEFI).
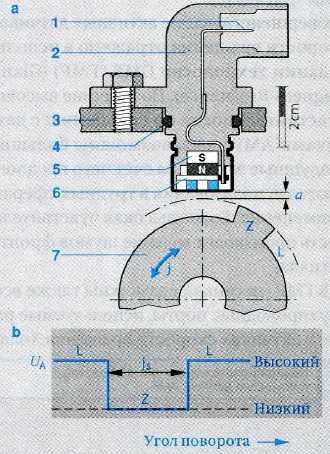
Рис. Стержневой датчик Холла:
- а Позиционирование датчика и приводного импульсного (активного) колеса
- b Прохождение выходного сигнала UA
- Электрический разъем (штекер)
- Корпус датчика
- Корпус двигателя
- Уплотнительное кольцо
- Постоянный магнит
- Интегральная схема Холла (1С Холла)
- Импульсное (активное)колесо с зубчатым сегментом (Z) и просветом (L)
- а Воздушный зазор
- Ф Угол поворота
Стержневые датчики Холла используют эффект Холла: вместе с распределительным валом вращается ротор (поз. 7, импульсное (активное) колесо с зубцами или сегментами или перфорированной диафрагмой) из ферромагнитного материала. Интегральная схема Холла (1С) (6) находится между ротором и постоянным магнитом (5), который формирует магнитное поле перпендикулярно элементу Холла.

Рис. Поколения датчиков распределительного вала: TIM = twist intensive mounting (это означает, что датчик может вращаться вокруг любой оси, без ущерба для точности). ТРО = true power on (это означает, что датчик распознает непосредственно в момент включения, находится ли он напротив зубца или просвета. Это важно для короткого времени синхронизации между сигналом коленчатого и распределительного вала)
Если зубец (Z) попадает на сенсорный элемент, пропускающий ток, (полупроводниковую пластинку) стержневого датчика, напряженность магнитного поля изменяется перпендикулярно элементу Холла. За счет этого создается сигнал по напряжению (напряжение Холла), который не зависит от относительной скорости между датчиком и импульсным (активным) колесом. Интегрированная электроника, обрабатывающая данные в микросхеме Холла (1С) подготавливает сигнал и выдает его как: сигнал прямоугольной формы.
(оцени первым)









"Питер - АТ"
ИНН 780703320484
ОГРНИП 313784720500453
Новости
-
Отзывы о Питер-АТ
Спасибо нашим клиентам за отзывы о нас:
-
Акция на ремонт вариаторных трансмиссий

-
Замена масла в двигателе в подарок
При замене масла в АКПП замена масла в двигателе бесплатно! -
Клиенту на заметку
-
Контрактные АКПП в СПб
