Датчик частоты вращения
Датчики частоты вращения колеса
Датчики частоты вращения колесаПрименениеДатчики частоты вращения колеса служат для определения скорости вращения колес автомобиля (числа оборотов колеса). Сигналы частоты вращения передаются по кабелю в блок управления ABS, ASR или ESP автомобиля, который индивидуально управляет силой торможения каждого колеса. Этот контур регулирования предотвращает блокирование (при наличии ABS) или прокручивание колес (при наличии ASR или ESP) и гарантирует устойчивость и управляемость автомобиля. Системы навигации также нуждаются в сигналах частоты вращения колеса, чтобы рассчитывать пройденный путь (например, в туннелях или при отсутствии сигналов спутника).
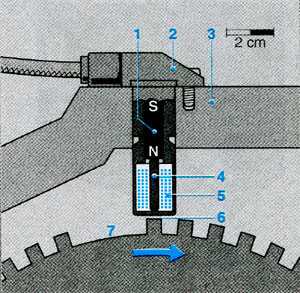
Конструкция и принцип действияСигналы для датчика частоты вращения колеса формируются с помощью стального импульсного датчика, жестко соединенного со ступицей колеса (для пассивных датчиков), или мультиполюсного магнитно-импульсного датчика (для активных датчиков). Этот импульсный датчик имеет такую же скорость вращения, что и колесо, и проходит бесконтактно чувствительную зону головки датчика. Датчик «считывает» без прямого контакта через воздушный зазор величиной до 2 мм (рис. 2).Воздушный зазор (с небольшими допусками) служит для того, чтобы обеспечить процесс получения сигнала без помех. Возможные помехи, такие как колебания, вибрации, температура, влажность, условия установки на колесе и пр. исключаются.
| Рисунок № 1 Пассивные (индуктивные) датчики частоты вращения | |
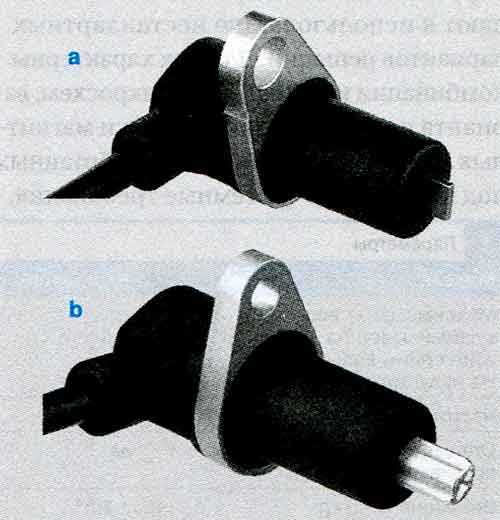 | а Резцовый контактный штифт (плоский индуктор) b Ромбовидный контактный штифт (крестовидный индуктор) |
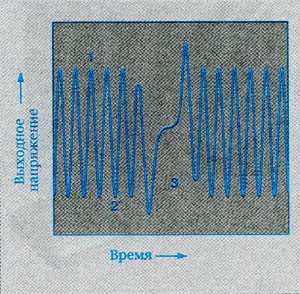
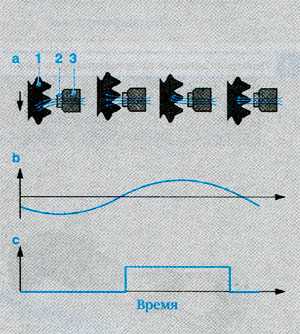
С 1998 г. вместо пассивных (индуктивных) датчиков частоты вращения в новейших разработках используются практически исключительно активные датчики частоты вращения колеса. Пассивные (индуктивные) датчики частоты вращения состоят из постоянного магнита (рис. 2, поз. 1) и соединенного с ним магнитомягкого полюсного контактного штифта (3), который вставлен в катушку (2). Таким образом, создается постоянное магнитное поле.Полюсный контактный штифт находится прямо над импульсным колесом (4), зубчатым колесом, жестко соединенным со ступицей. Во время вращения импульсного колеса существующее постоянное магнитное поле «нарушается» из-за постоянной смены зубца и впадины. За счет этого изменяется магнитный поток, проходящий через полюсный контактный штифт, а вместе с ним и магнитный поток, проходящий через витки катушки. Смена магнитных полей индуцирует в обмотке переменное напряжение, которое снимается на концах обмотки.Как частота, так и амплитуда переменного напряжения пропорциональны числу оборотов колеса (скорости вращения) (рис. 3). Когда колесо не движется, индуцируемое напряжение также равно нулю.Форма зубцов, воздушный зазор, крутизна скачка напряжения и входная чувствительность прибора управления определяют минимальную измеряемую скорость автомобиля, а также минимально возможную для использования ABS чувствительность срабатывания и скорость переключения.
| Рисунок № 2 Чертеж принципа действия пасивного датчика скорости вращения | |
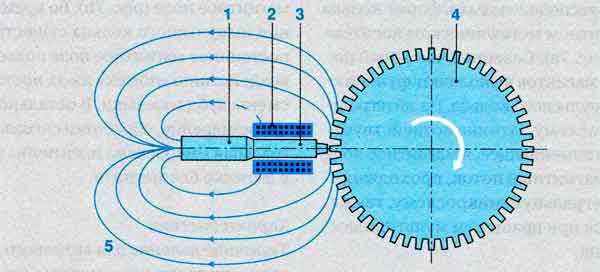 | 1 Постоянный магнит2 Магнитная катушка3 Полюсный контактный штифт4 Импульсное колесо из стали5 Магнитные линии поля |
Поскольку условия монтажа на колесе не везде одинаковые, существуют различные формы полюсных контактных штифтов и различные варианты монтажа. Наиболее распространены резцовый полюсный контактный штифт (рис. 1а, также называемый плоским индуктором) и ромбовидный контактный штифт (рис. lb, также называемый крестовидным индуктором). Оба полюсных контактных штифта при монтаже должны быть точно направлены к импульсному кольцу.
| Рисунок № 3 Выходное напряжение сигнала пассивного датчика скорости вращения | |
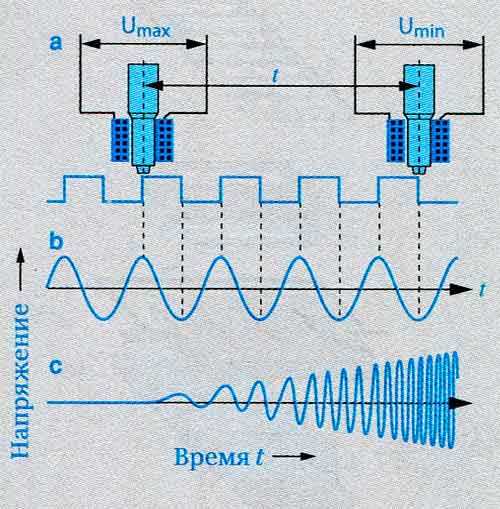 | а Пассивный датчик скорости вращения с импульсным кольцом b Сигнал датчика при постоянной скорости вращения колеса с Сигнал датчика при возрастающей скорости вращения колеса |
Активный датчик скорости вращенияСенсорные элементыВ современных тормозных системах используются практически исключительно активные датчики скорости вращения (рис. 4). Обычно они состоят из герметично залитой пластиком кремниевой интегральной микросхемы, распложенной в головке датчика.Наряду с магниторезистивными интегральными микросхемами (изменение электрического сопротивления при изменении магнитного поля) фирма «Bosch» все еще использует в больших объемах сенсорные элементы Холла, которые реагируют на малейшие изменения магнитного поля и поэтому могут использоваться при воздушных зазорах большего размера по сравнению с пассивными датчиками скорости вращения.Активное (импульсное) кольцо В качестве импульсного кольца активного датчика скорости вращения используется мультиполюснное колесо. Речь идет о поочередно расположенных постоянных магнитах, расположенных в форме кольца на немагнитном металлическом носителе (рис. 6 и рис. 7а). Северный и южный полюса этих магнитов выполняют функцию зубцов импульсного кольца. На интегральную микросхему датчика воздействует постоянно изменяющееся магнитное поле. Поэтому магнитный поток, проходящий через интегральную микросхему, также изменяется при вращении мультиполюсного кольца.
| Рисунок № 4 Активный датчик скорости вращения |
 |
В качестве альтернативы мультиполюсному кольцу можно использовать стальное зубчатое колесо. В этом случае на интегральную микросхему Холла устанавливается магнит, вырабатывающий постоянное магнитное поле (рис. 7b). Во время вращения импульсного кольца существующее постоянное магнитное поле подвергается воздействию «помех» из-за постоянной смены зубца-выемки. В остальном принцип измерения, обработки сигнала и интегральная микросхема идентичны таковым в датчике без магнита.
| Рисунок № 5 Экспозиционный чертеж с мультиполюсным импульсным датчиком | |
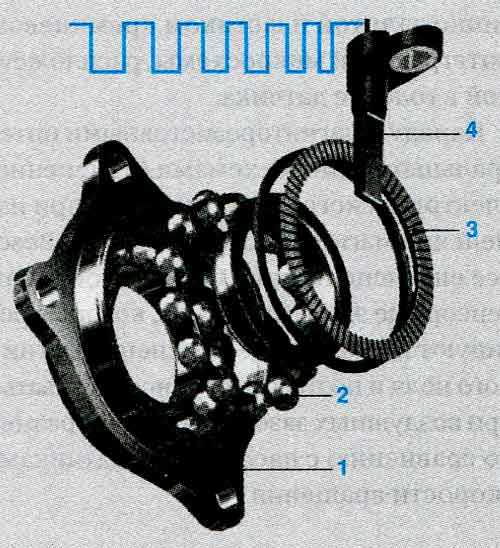 | 1 Ступица колеса2 Шарикоподшипник3 Мультиполюсное кольцо4 Датчик скорости вращения колеса |
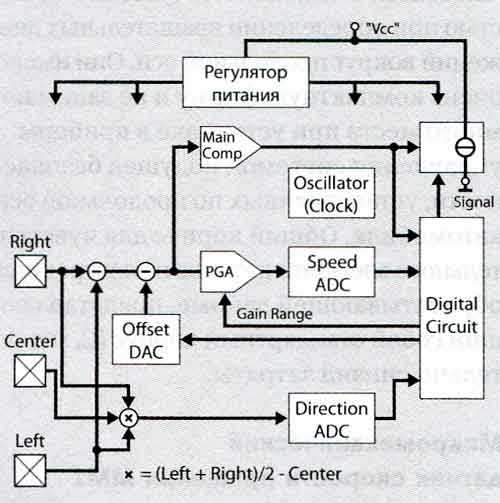
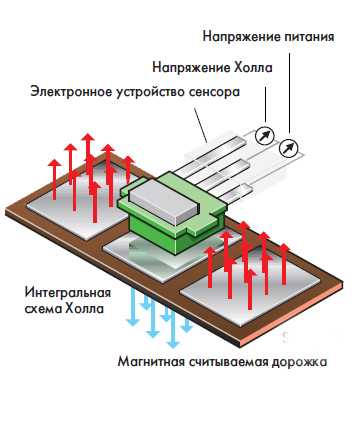
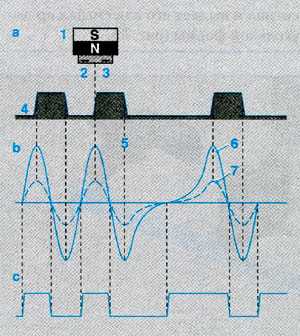
ХарактеристикиТипичное явление для активного датчика скорости вращения — интеграция измерительного элемента Холла, усилителя сигнала и подготовки сигнала в интегральной микросхеме (рис. 8). Данные о скорости вращения передаются в виде подводимого тока в форме прямоугольных импульсов (рис. 9). Частота импульсов тока пропорциональна числу оборотов колеса, а считывание показаний возможно почти до остановки колеса (0,1 км/ч).
| Рисунок № 6 тивный датчик скорости вращения в разрезе | |
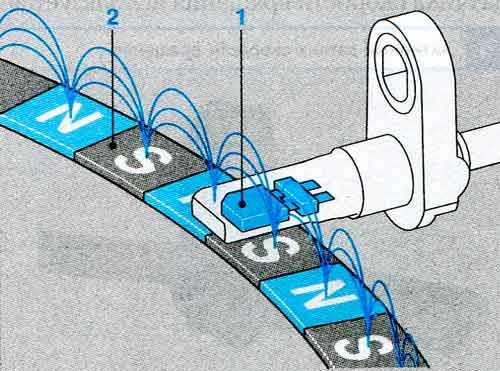 | 1 Сенсорный элемент2 Мультиполюсное кольцо со сменнымнамагничиванием север-юг |
| Рисунок № 7 Чертеж принципа работы при определении скорости вращения | |
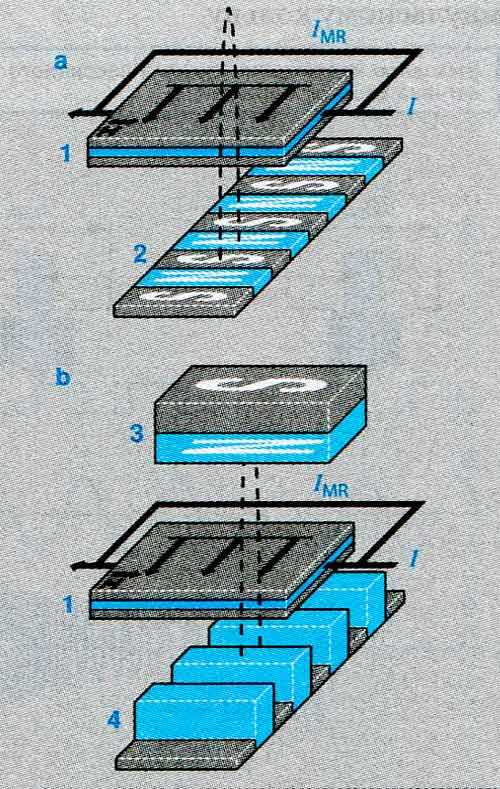 | а Интегральная микросхема Холлас мультиполюсным импульсным датчиком b Интегральная микросхема Холла со стальным импульсным кольцом и магнитом в датчике 1 Сенсорный элемент2 Мультиполюсное кольцо3 Магнит4 Стальное импульсное колесо |
Питающее напряжение находится в диапазоне между 4,5 и 20 Вольт. Уровень прямоугольного выходного сигнала составляет 7 мА (низкий) и 14 мА (высокий). При такой форме передачи цифровых сигналов, например, индуктивное напряжение помех является неэффективным по сравнению с пассивным индуктивным датчиком. Связь с блоком управления осуществляется двухпроводным кабелем.
| Рисунок № 8 Блок-схема интегральной микросхемы Холла |
 |
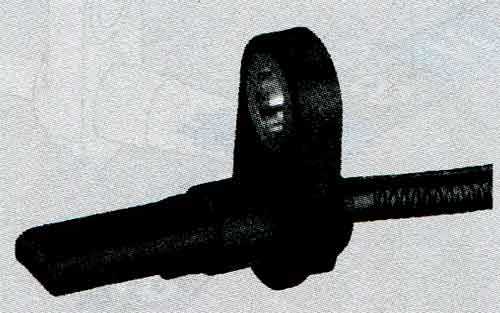
Компактная конструкция и небольшой вес позволяют монтировать активный датчик скорости вращения на подшипнике колеса или в нем (рис. 10). Для этого подходят различные стандартные формы головки датчика.
| Рисунок № 9 Преобразование сигнала в интегральной микросхеме Холла | |
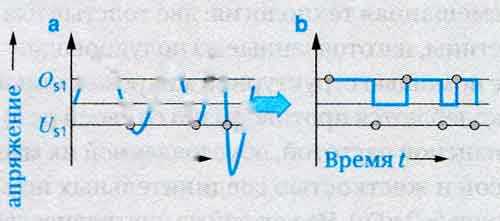 | а Исходный сигнал b Выходной сигнал 0S1 Верхний порог переключения US1Нижний порог переключения |
| Рисунок № 10 Подшипник колеса с датчиков скорости вращения | |
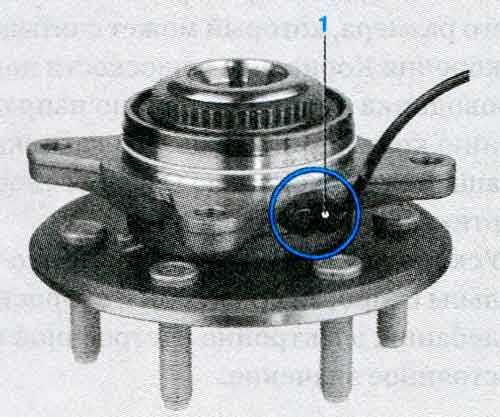 | 1 Датчик скорости вращения |
Цифровая обработка сигнала позволяет передавать кодированную дополнительную информацию с помощью широтноимпульсно-модулируемого выходного сигнала (рис. 11).Определение направления вращения колес: это особенно необходимо для функции «Hill Hold Control», предотвращающей откат автомобиля назад во время подъема на гору. Определение направления вращения также используется для навигации автомобиля.Определение состояния остановки: эти данные также обрабатываются в функции «Hill Hold Control». Дальнейшая обработка данных входит в раздел самодиагностики.Качество сигнала датчика: можно передавать данные о качестве сигнала датчика. Посредством этого водитель в случае ошибки может получить информацию о необходимости своевременно обратиться в сервисную службу.
| Рисунок № 11 Кодированная передача данных с помощью широтно-импульсно-модулируемых сигналов | |
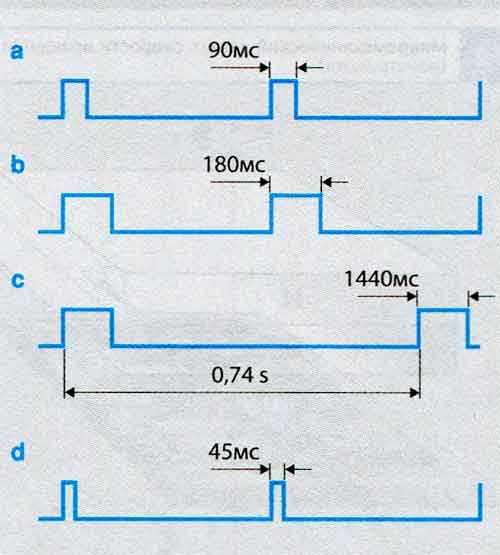 | а Сигнал скорости при движении назадb Сигнал скорости при движении впередс Сигнал, когда автомобиль стоитd Качество сигнала датчика, самодиагностика |
Мир автомобилей Volkswagen.
Они представляют собой индуктивные датчики, которые замеряют скорость вращения колес с использованием ротора датчика на каждой колесной ступице. • Действие
Датчик состоит из магнитного сердечника и катушки. Магнитное поле, которое создается постоянным магнитом, меняется в зависимости от положения ротора датчика. Изменения магнитного поля индуцируют в катушке датчика ток. Чем выше скорость прохождения ротора мимо катушки датчика, тем выше частота.
Активные колесные сенсоры
Полезное: Если ваш автомобиль нуждается в ремонте глушителя, рекомендуем обратиться на сайт компании www.glushiteli-v-spb.ru, производящей качественный ремонт глушителей и катализаторов практически всех современных марок автомобилей.
• Использование сигнала По этой частоте блок управления АБС рассчитывает частоту вращения колеса. Сигналы частоты вращения колес используются различными системами автомобиля.
• Выход из строя датчиков В отсутствие сигналов от датчиков нет возможности определить по скорости движения автомобиля порог срабатывания усилителя экстренного торможения, и усилитель не включается.
• Самодиагностика Отказы в работе датчиков отмечаются системой самодиагностики и фиксируются в регистраторе неисправностей.
Имеется еще один вид датчиков частоты вращения колес, которые называются активными сенсорами и все шире используются для замера частоты вращения колес. Название “активные” вызвано необходимостью подачи напряжения на эти датчики, в чем индуктивные датчики не нуждаются.
• Действие Основной частью активного сенсора является интегральная схема Холла. Когда по полупроводниковой пластине проходит ток, возникает напряжение Холла. Если вокруг сенсора изменяется магнитное поле, то также изменяется и напряжение Холла, поскольку изменяется сопротивление интегральной схемы Холла.
В зависимости от исполнения сенсора он может взаимодействовать или с намагниченным ротором или с сигнальным ротором с намагниченной считываемой дорожкой. Когда намагниченный ротор или сигнальный ротор проходит мимо сенсора, изменяется магнитное поле и, тем самым, напряжение Холла.
• Использование сигнала По изменению напряжения блок управления рассчитывает частоту вращения колеса. Посредством активных сенсоров возможно измерение очень низких скоростей вращения колес.
• Самодиагностика Отказы в работе сенсоров отмечаются системой самодиагностики и фиксируются в регистраторе неисправностей.
1. Датчики скорости вращения
Министерство образования Республики Беларусь
Учреждение образования
Белорусский государственный университет информатики и радиоэлектроники
Кафедра микро- и наноэлектроники
Отчет по лабораторной работе №2
«Датчики скорости вращения»
По дисциплине «Микроэлектронные датчики и сенсорные устройства»
Проверил: Выполнил:
доц. Родионов Ю. А.
Минск 2010
Цель работы:
1. Изучение теоретических материалов по теме “Датчики скорости вращения”:
1.1) основные определения датчиков скорости вращения;
1.2) классификация датчиков скорости вращения;
1.3) основные конструктивно-технологические решения исполнения датчиков.
2. Изучение теоретических материалов по теме “Микроэлектронный магниторезистивный датчик скорости вращения”:
2.1) магниторезистивный эффект в датчиках;
2.2) материалы и вопросы технологии;
2.3) интегральная схема формирования сигнала датчика;
2.4) размещение датчика при измерении скорости вращения.
3. Изучение графических материалов по теме “Датчики скорости вращения”:
3.1) температурные зависимости;
3.2) расположение датчика;
3.3) другие зависимости.
1.1. Основные определения датчиков скорости вращения
Датчики скорости вращения представляют собой, так называемые, частотные датчики. Их принцип действия состоит в преобразовании скорости вращения (углового перемещения) в частоту изменений потока энергии (электрического тока или напряжения). Скорость вращения в технике представляет собой число оборотов в единицу времени и носит название частоты вращения (измеряется в Гц).
Выходной сигнал датчика скорости вращения может быть представлен в виде синусоидального изменения величины (напряжения) или в виде последовательности коротких импульсов. Для использования в цифровых системах контроля последний вид сигнала более предподчителен.
Методы измерения угловых скоростей вращения:
1. абсолютный метод; основан на определении числа оборотов вала и измерении соответствующего промежутка времени;
2. метод сравнения числа оборотов; основан на сравнении при помощи измерительных средств числа оборотов испытываемого вала с известной частотой какого-либо независимого периодического процесса.
Прибор для измерения угловых скоростей в технике называется тахометром. Обычно при помощи тахометров измеряют среднюю скорость вращения, постоянную в заданном промежутке времени.
Тахометры представляют собой современные модули автоматики и могут применяться в системах управления автоматическими линиями, станками и т.д.
Принцип работы тахометров. С помощью кнопок на лицевой панели задается установка количества импульсов датчика на оборот вала, которая высвечивается на индикаторе, и запоминается в энергонезависимой памяти. Ввод установки аналогичен вводу у счетчиков. На вход тахометра поступают импульсы с датчика (индуктивного/оптического или другого выключателя), контролирующего одну или несколько меток на валу. По частоте следования импульсов производится вычисление частоты вращения вала (обороты в минуту) и выдача значения на индикатор.
1.2. Классификация датчиков скорости вращения
По способу воспроизведения показаний: приборы с непосредственным отсчетом и самопишущие.
По принципу конструктивного выполнения: механические и электрические.
Механические тахометры: центробежные, часовые, дифференциальные, вибрационные, фрикционные, гидравлические, пневматические, суммирующие и др.
Современные электрические методы измерения скоростей вращения можно разделить на две основные группы:
1. приборы, измеряющие напряжение датчика, пропорциональное измеряемым скоростям, U=f(n);
2. приборы измеряющие частоту переменного тока датчика, пропорциональную измеряемой угловой скорости вращения, F=f(n).
1.3. Конструктивно-технологические решения исполнения датчиков
1. Индукционные датчики скорости вращения преобразуют измеряемую неэлектрическую величину в ЭДС индукции.
Принцип действия основан на использовании закона электромагнитной индукции.
Согласно закону Фарадея, индуцированное напряжение или электродвижущая сила (э.д.с.) в контуре численно равна и противоположна по знаку скорости изменения магнитного потока, сквозь поверхность ограниченную этим контуром, т.е.
e = -dφ/dt
Следовательно, магнитный поток, пересекающий контур, описывается функцией вида:
φ (x) = φ0F(x),
где x – переменная углового положения.
Отсюда видно, что относительное перемещение между источником потока и контуром наводит в последнем э.д.с., амплитуда которой пропорциональна скорости перемещения, вследствие чего на выходе датчика формируется сигнал:
e = - φ0(F(x)/dx)·(dx/dt)
В качестве датчиков скорости вращения обычно применяют тахогенераторы, выполненные в виде небольших генераторов постоянного или переменного тока с независимым возбуждением от постоянного магнита.
Устройство тахогенератора постоянного тока. Статор (индуктор), представляющий собой ферромагнитный каркас, несущий 2 (2p в общем случае) полюса, направляющих поле магнитной индукции, образуемое током через катушки или постоянными магнитами. Ротор, представляющий собой многослойный цилиндр из листового железа, вращающийся между полюсами статора, его ось совпадает с осью статора. По его периферии параллельно оси в углублениях располагается n = 2k медных проводников, называемых активными. Активные проводники соединены с пассивными, расположенными вдоль диаметра ротора. Коллектор – это цилиндр с осью, что и у ротора, но имеющей меньший диаметр, несущий изолированные между собой пластинки, каждая из которых связана с активным проводником. Щётки, которые закрепляются на двух диаметрально противоположных клеммах коллектора, располагаются перпендикулярно направлению индукции, служат для снятия максимальной величины э.д.с.
Принцип действия тахогенератора постоянного тока заключается в следующем: 2k проводников соединяются так, чтобы образовать два одинаковых комплекта по k последовательно соединённых проводников. В каждом из них возникает э.д.с., пропорциональная угловой скорости ω. Эта э.д.с. поступает во внешнюю цепь через две щётки, расположенных на коллекторе. Если ротор связан со внешним контуром, то э.д.с. вызывает в нём ток I, проходящий через активные проводники по разные стороны от нейтральной линии. Если проводники составлены попарно и симметрично относительно нейтральной линии, они создают поперечную индукцию, перпендикулярную линии полюсов и пропорциональную I (реакция ротора). Реакция ротора вызывает искривление силовых линий поля и приводит к смещению нейтральной линии в направлении движения. Величина э.д.с. ускоренно убывает с ростом тока I.
Достоинства: знак выходного сигнала изменяется одновременно с изменением направления вращения.
Недостатки: вследствие реакции ротора, выходное напряжение не является линейной функцией скорости вращения.
Тахогенератор переменного тока отличается тем, что в нём отсутствует коллектор и щётки.
Устройство тахометрического асинхронного генератора. Ротор состоит из тонкого немагнитного цилиндра, вращающегося со скоростью ω. Статор состоит из магнитного листового железа и несёт две обмотки: а) возбуждающую обмотку, к которой прикладывается напряжение, б) измерительную обмотку, в которой наводится э.д.с.
Принцип действия. Э.д.с., наводимая в измерительной обмотке, формирует периодический сигнал, амплитуда которого пропорциональна скорости вращения ω.
Достоинства: увеличение срока службы, отсутствие флуктуаций выходного напряжения, малый момент инерции.
Недостатки: более сложная схема включения.
2. Фотоэлектрические датчики скорости вращения регистрируют изменение светового потока, связанное с изменением положения в пространстве каких-либо движущихся частей механизмов и машин.
В качестве датчика скорости вращения применяется фотоэлектрический датчик с прерывателем.
Устройство фотоэлектрического датчика с прерывателем: фотосопротивление, диск с калиброванными отверстиями, который насаживается на вал измеряемого объекта. Фотосопротивление подключается последовательно с сопротивлением к источнику постоянного напряжения.
Принцип действия: Освещенность рабочей поверхности фотосопротивления прерывается диском с отверстиями. Если фотосопротивление не освещено, по нему течет темновой ток IT. В случае освещенности фотосопротивления, по нему течет световой ток IC.
Так как проводимость фотосопротивления при облучении его световым потоком F растет, то его световое сопротивление RC становится меньше темнового сопротивления RТ.
При вращении диска освещенность фотосопротивления модулируется, и в его цепи течет пульсирующий ток. Таким образом, ток, проходящий через фотосопротивление, является функцией светового потока F. Частота пульсаций тока определяется числом отверстий в диске и его скоростью вращения:
FД = n/60·S,
где n- скорость вращения диска, об/мин;
S- число отверстий в диске.
Достоинства: универсальность, простота конструкции, широкий рабочий диапазон измеряемой синхронной частоты, малая нагрузка на вал испытываемого объекта, возможность простого промежуточного преобразования частоты обычных серийных датчиков.
3. Емкостные датчики скорости вращения используются для преобразования механических перемещений в изменение емкости.
Устройство: конденсатор переменной емкости C с воздушным диэлектриком, маломощный трансформатор, со вторичной обмотки которого снимается сигнал, напряжение которого пропорционально скорости вращения. Емкостные датчики питаются переменным напряжением (обычно повышенной частоты - до десятков мегагерц). В качестве измерительных схем обычно применяют мостовые схемы и схемы с использованием резонансных контуров. В последнем случае, как правило, используют зависимость частоты колебаний генератора от емкости резонансного контура, т.е. датчик имеет частотный выход.
Принцип действия датчиков этого типа основан на изменении зарядного тока конденсатора пропорционально скорости изменения его емкости.
Вращение вала может быть функционально связано с изменением диэлектрической проницаемости , площади обкладок или расстояния между обкладками .
Для двухобкладочного плоского конденсатора электрическая емкость определяется выражением:
С = ε0εS/h
где ε 0 - диэлектрическая постоянная; ε - относительная диэлектрическая проницаемость среды между обкладками; S - активная площадь обкладок; h - расстояние между обкладками конденсатора.
Для преобразования механических перемещений в изменение емкости используются зависимости C(S) и C(h).
Если емкость конденсатора изменяется пропорционально изменению площади его обкладок S с частотой , то
C = m*S,
где m = /.
Емкостное сопротивление конденсатора XC линейно зависит от расстояния между пластинами конденсатора:
XC = 1/C = /C
Достоинства: простота, высокая чувствительность и малая инерционность.
Недостатки: влияние внешних электрических полей, относительная сложность измерительных устройств.
4. Ультразвуковые датчики скорости вращения применяются для измерения скорости вращения деталей, установленных в труднодоступных местах или для измерения в агрессивных средах.
Устройство. Датчик состоит из генератора ультразвуковых колебаний, излучающей головки, вертушки, вращающейся в трубопроводе, принимающей головки и демодулятора.
Принцип действия основан на различном поглощении или отражении ультразвуковых колебаний разнородными средами. При вращении металлической вертушки за счет различной проводящей способности жидкости и металла несущая частота ультразвуковых колебаний модулируется частотой вращения вертушки. С приемной головки сигнал поступает на измерительную аппаратуру. После демодуляции сигнала получается напряжения с частотой, пропорциональной скорости вращения вертушки.
Достоинства: высокая точность измерения.
Недостатки: шум, вибрация, производимые при движении излучателя, а также низкое разрешение.
5. Магниторезистивные датчики скорости вращения преобразуют измеряемую неэлектрическую величину в изменение сопротивления ферромагнитных материалов.
Устройство. Датчик состоит из измерительной катушки, которая снабжается магнитным сердечником. Катушка помещена перед диском или перед вращающимся ферромагнитным телом.
Принцип действия основан на магниторезистивном эффекте. Этот эффект заключается в том, что некоторые ферромагнитные материалы изменяют свое электрическое сопротивление при воздействии магнитного поля. Степень этого изменения зависит от величины напряженности магнитного поля и угла между вектором напряженности и направлением тока. На магнитный сердечник катушки воздействует поток индукции постоянного магнита. Последовательность скачков магнитных свойств диска или вращающегося тела вызывает периодическое изменение магнитного сопротивления в магнитной цепи катушки, которое наводит в ней э.д.с. с частотой, пропорциональной скорости вращения.
Магнит, установленный на оси вращения, при каждом обороте проходит один раз мимо магниторезистивного датчика, вызывая изменение его сопротивления (см. рис.1).
Рис.1. Схема реализации магниторезистивного датчика вращения.
Изменение сопротивления с помощью схемы, показанной на рис. 2, преобразуется в изменение напряжения Uа. Зависимость выходного напряжения сигнала от времени показана на рис. 3.
Рис.2. Схема изменения сопротивления.
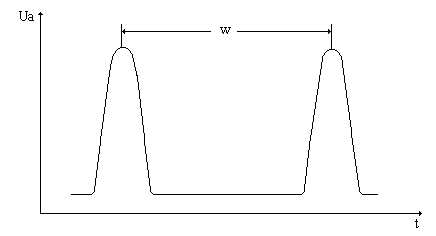
Рис.3. Зависимость выходного напряжения сигнала от времени.
Достоинства: простота устройства, надёжность, дешевизна.
Благодаря своим достоинствам микроэлектронные магниторезистивные датчики скорости вращения нашли широкое применение в автомобильной и бытовой технике.
Датчики частоты вращения двигателя
Датчики частоты вращения двигателя используются в системах управления двигателем для
- измерения числа оборотов двигателя и
- определения положения коленчатого вала (положение поршня двигателя).Число оборотов рассчитывается по интервалу между сигналами датчика скорости вращения.
Индуктивные датчики скорости вращения
Конструкция и принцип действия
Датчик монтируется прямо напротив ферромагнитного зубчатого колеса (рис. 1, поз. 7) с определенным воздушным зазором. Он имеет сердечник из магнито мягкой стали (полюсный контактный штифт, поз. 4) с обмоткой (5). Полюсный контактный штифт соединен с постоянным магнитом (1). Магнитное поле распространяется через полюсный контактный штифт, проходя в зубчатое колесо. Магнитный поток, проходящий через катушку, зависит от того, попадает ли расположение датчика напротив впадины или зуба колеса. Зубец соединяет в пучок магнитный поток рассеяния, исходящий от магнита.
Через катушку происходит усиление сетевого потока. Впадина, наоборот, ослабляет магнитный поток. Эти изменения магнитного потока при вращении зубчатого колеса индуцируют в катушке синусоидальное выходное напряжение, пропорциональное скорости изменения и числу оборотов двигателя (рис. 2). Амплитуда переменного напряжения интенсивно возрастает с увеличением числа оборотов (несколько мВ... > 100 В). Достаточная амплитуда присутствует, начиная с минимального числа оборотов от 30 в минуту.
 |
|
Активные датчики скорости вращения
Активные датчики скорости вращения работают по магнитостатическому принципу. Амплитуда выходного сигнала не зависит от числа оборотов. Благодаря этому можно измерять скорость вращения и при очень низком числе оборотов (квазистатическое определение числа оборотов).
Дифференциальный датчик Холла
На проводящей ток пластинке, по которой вертикально проходит магнитная индукция В, поперечно к направлению тока можно снимать напряжение UH (напряжение Холла), пропорциональное направлению тока.
 |
|
В дифференциальном датчике Холла магнитное поле вырабатывается постоянным магнитом (рис. 3, поз. 1). Между магнитом и импульсным кольцом (4) находятся два сенсорных элемента Холла (2 и 3). Магнитный поток, который проходит сквозь них, зависит от того, находится ли датчик скорости вращения напротив зубца или паза. Благодаря созданию разности сигналов от обоих датчиков достигается снижение магнитных сигналов возмущения и улучшенное соотношение сигнала/шума. Боковые поверхности сигнала датчика могут обрабатываться без оцифровывания непосредственно в блоке управления.
Вместо ферромагнитного зубчатого колеса используются также многополюсные колеса. Здесь на немагнитном металлическом носителе установлен намагничивающийся пластик, который попеременно намагничивается. Эти северные и южные полюсы принимают на себя функцию зубцов колеса.
AMR -датчики
Электрическое сопротивление магниторезистивного материала (АМР, анизотропный магниторезистивный) является анизотропным.
 |
|
Это означает, что оно зависит от направления магнитного поля, которое на него воздействует. Это свойство используется в АМР -датчике. Датчик находится между магнитом и импульсным кольцом. Линии поля изменяют свое направление, когда вращается импульсное (активное) колесо (рис. 4). В результате формируется синусоидальное напряжение, которое усиливается в схеме обработки данных и преобразуется в сигнал прямоугольной формы.
GMR -датчики
Усовершенствование активных датчиков скорости вращения отражено в использовании технологии GMR (ГМР) (Giant Magneto-Resistance). По причине высокой чувствительности по сравнению с датчиками АМР здесь возможны большие воздушные зазоры, за счет чего предполагаются использования в трудных сферах применения. Более высокая чувствительность производит меньше шумов фронта сигнала.
В ГМР -датчиках возможны также все двухпроводные порты, используемые ранее в датчиках скорости вращения Холла.
 |
|









"Питер - АТ"
ИНН 780703320484
ОГРНИП 313784720500453
Новости
-
Отзывы о Питер-АТ
Спасибо нашим клиентам за отзывы о нас:
-
Акция на ремонт вариаторных трансмиссий

-
Замена масла в двигателе в подарок
При замене масла в АКПП замена масла в двигателе бесплатно! -
Клиенту на заметку
-
Контрактные АКПП в СПб
