Гидроусилитель шагового двигателя
Адаптивные замкнутые системы
Это самоподнастраивающиеся системы, которые чаще всего работают следующим образом:
При изменении силы резания в процессе обработки изменяют величину подачи: с ростом силы резания подачу уменьшают и наоборот(см. блок –схему адаптивного управления). Она включает блоки измерения силы резания рх и ру и их записи, блоки коррекции координатных перемещений x,y и блоки оптимизации режимов резания. Устройство выполняет 2 функции: осуществляет измерения составляющих рх и ру силы резания по координатным осям и в соответствии с полученной информацией автоматически корректирует траекторию движения.
В блоке коррекции сигналы пропорциональные составляющим деформации фрезы по координатам Δx , Δy преобразуются в соответствующее число импульсов Δ Nx, ΔNy и алгебраически суммируются с числом импульсов исходной программы. Результирующий сигнал поступает на обработку привода подачи.
Конструктивные особенности станков с чпу Привод главного движения в станках с чпу
Диапазон регулирования должен охватывать скорости, требуемые как для высокопроизводительной чистовой обработки, так и для позиционирования шпинделя.
Должен обеспечить длительный режим работы при полном использовании мощности
Бесступенчатое регулирование частоты вращения и как можно меньше механических ступеней
Минимальное время разгона и торможения.
Приводы подач
Преобразование электрических сигналов в перемещение рабочих органов станка, стола, салазок, суппорта, шпиндельной бабки осуществляется приводами подач, состоящими из приводного двигателя, передаточных механизмов и системы обратной связи с ДОС. Привод подач – один из основных Эл-тов станка с ЧПУ, определяющий его производительность, точность, надежность работы и стоимость.
Основные хар-ки привода подач: мощность, скорость, быстродействие, точность, диапазон регулирование, кпд, стоимость, габариты.
В качестве приводных двигателей в станках с ЧПУ применяют шаговые Эл-двигатели постоянного тока и гидродвигатели.
Шаговый двигатель подач с гидроусилителем.
Шаговый привод подач имеет разомкнутую схему управления и строится на основе несилового шагового Эл-двигателя и гидроусилителя или с применением силового шагового Эл-двигателя.
При применении шагового двигателя точность перемещения рабочих органов станка будет определяться погрешностью отработки шагового двигателя в командных двигателях, а также зазорами и упругими деформациями кинематической цепи.
Шаговые двигатели обеспечивают строго определенный угол поворота ротора при подаче направляющего напряжения на обмотки его статора.
Принцип работы шагового двигателя напоминает работу поворотного электромагнита.
Схема работы шагового двигателя с гидроусилителем (рис.39 а).
При повороте ротор шагового двигателя на определенный угол винтовая часть 1 распределителя вывертывается из неподвижной в этот момент гайки 2 , перемещая распределитель влево. При этом масло поступает в полость гидродвигателя 3, который через зубчатую передачу 4 вращает ходовой винт 5 привода рабочего хода 6.
При повороте ротора гидродвигателя поворачивается гайка 2 (при неподвижной винтовой части распределителя) и возвращает распределитель обратно в первоначальное положение до момента перекрытия в нем щелей. Последнее произойдет при повороте ротора гидродвигателя точно на такой же угол, на который повернулся распределитель от шагового двигателя . При повороте шагового двигателя в другую сторону распределитель перемещается уже вправо и открывает каналы для прохода масла под давлением в другую полость гидродвигателя, вращая его тем самым в другую сторону.
Большая Энциклопедия Нефти и Газа
Cтраница 4
Принципиальная схема шаговой системы управления представлена на рис. VIII-26. Основными элементами являются: шаговый двигатель ШД, кодовый преобразователь К, гидроусилитель момента ГУМ, который состоит из гидродвигателя и вращающегося золотника. На структурной схеме показано, что в шаговой системе программного управления магнитную ленту МЛ можно включать в двух местах: либо сразу после интерполятора И, либо после кодового преобразователя. Последний способ включения магнитной ленты в схему является предпочтительным, так как он характеризуется повышенной надежностью передачи информации. Разомкнутая система управления шаговым двигателем разработана ЭНИМСом и широко применяется в отечественной промышленности. [46]
Шаговые системы непр-ерывного управления - это системы, в которых суммирование импульсов, поступающих от интерполятора, производится совместной работой шагового двигателя и схемы электронного коммутатора, осуществляющего переключение фазовых обмоток двигателя. Конечным звеном в таких системах управления является шаговый двигатель, у которого поворот выходного вала на фиксированный угол определяется количеством электрических импульсов, поданных в схему. Обычно между рабочим органом и шаговым двигателем встраивают гидроусилители момента. В шаговых системах использован принцип разомкнутого управления без обратной связи. Точность такой системы определяется точностью изготовления главного кинематического звена - ходового винта с шариковой гайкой. [47]
Шаговые системы непрерывного управления - это системы, в которых суммирование импульсов, поступающих от интерполятора, производится совместной работой шагового двигателя и схемы электронного коммутатора, осуществляющего переключение фазовых обмоток двигателя. Конечным звеном в таких системах управления является шаговый двигатель, у которого поворот выходного вала на фиксированный угол определяется количеством электрических импульсов, поданных в схему. Обычно между рабочим органом и шаговым двигателем встраиваются гидроусилители момента. В шаговых системах использован принцип разомкнутого управления без обратной связи. Точность такой системы определяется точностью изготовления главного кинематического звена - ходового винта с шариковой гайкой. [48]
Их используют для управления следящим золотником вращающегося гидравлического двигателя. Этим двигателем приводится в движение подвижной узел станка. Гидродвигатель и гидросистема управления им образуют так называемый гидроусилитель момента. Взамен вращающегося гидродвигателя шаговый двигатель со следящим золотником может управлять гидроцилиндром поступательно движущегося узла. Шаговые приводы могут работать при их подключении к источнику импульсов с частотой до 8000 Гц и более. При больших частотах шагов прерывистость ( дискретность) перемещения полностью сглаживается. [49]
Шаговая система ЧПУ приведена на рис. III.7. В этом случае ввод программы осуществляется с перфоленты через фотосчитывающее устройство ФСУ в интерполятор И. Преобразованные сигналы команд в виде электроимпульсов соответствующих числа и частоты генерации поступают в усилитель считывания УС и далее - в распределитель импульсов РИ, который распределяет импульсы по обмоткам статора шагового двигателя ШД. Мощность ШД недостаточна для того, чтобы непосредственно вращать через передачу ходовой винт РО. С целью усиления крутящего момента вращение передается через гидроусилитель моментов ГУ. Питание ГУ маслом ( рабочее тело) осуществляет гидронасосная станция, имеющая самостоятельный привод. [50]
Разомкнутые системы характеризуются наличием одного потока информации, поступающего со считывающего устройства к исполнительному органу станка. В механизмах подач таких систем используют шаговые двигатели. Крутящий момент, развиваемый шаговым двигателем, недостаточен для привода механизма подачи. Поэтому указанный двигатель применяют в качестве задающего устройства, сигналы которого усиливаются различными способами, например с помощью гидроусилителя моментов ( аксиально-поршневого гидродвигателя), вал которого связан с ходовым винтом привода подач. В разомкнутой системе нет датчика обратной связи, и поэтому отсутствует информация о действительном положении исполнительных органов станка. [51]
Разомкнутые системы характеризуются наличием одного потока информации, поступающего со считывающего устройства к исполнительному органу станка. В механизмах подач таких систем используют шаговые двигатели. Крутящий момент, развиваемый шаговым двигателем, недостаточен для привода механизма подачи. Поэтому указанный двигатель применяют в качестве задающего устройства, сигналы которого усиливаются различными способами, например с помощью гидроусилителя моментов ( аксиально-поршневого гидродвигателя), вал которого связан с ходовым винтом подач. В разомкнутой системе нет датчика обратной связи и поэтому отсутствует информация о действительном положении ИО станка. [52]
При повороте крана от нулевого положения масло поступает в одну из полостей гидродвигателя, а другая полость соединяется со сливом, причем вал / вращается в ту сторону, в какую повернут кран. В установившемся движении скорости вращения входного и выходного валов равны. Для перемещения рабочих органов машин часто применяются гидроусилители крутящего момента в сочетании с механической передачей. Вращение входного вала гидроусилителя осуществляется вручную или электродвигателем. Гидроусилитель моментов может быть применен так же как синхронный гидравлический вал. В этом случае механизмы, вращающие входной вал, практически разгружены от крутящих моментов и должны обеспечивать лишь заданную кинематику движения. [53]
В этом случае в качестве двигателя Д используется так называемый шаговый двигатель. От обычных двигателей он отличается тем, что при получении от СЧПУ через блок управления БУ командного импульса поворанивает свой вал на некоторый малый угол - шаг. Число импульсов определяет значение перемещения, а их частота - скорость подачи. Развиваемый шаговым двигателем момент часто недостаточен для перемещения подвижного элемента станка. Поэтому шаговый двигатель работает в подобных случаях совместно с гидроусилителем момента ГУ, который представляет собой мощный гидродвигатель. Шаговый двигатель воздействует на золотниковое устройство гидродвигателя. Как правило, системы с шаговыми двигателями выполняются без обратной связи по положению, т.е. разомкнутыми. [54]
Статор 2 и ротор / имеют одинаковое ( парное) количество полюсов ( зубцов), разделенных на три секции. Полюса ротора / смещены друг относительно друга на Va межполюсного расстояния. Обмотки 4 электромагнитов статора, соединенные последовательно в секции I, II и III, питаются независимо одна от другой. Если поочередно включать напряжение в обмотке секций I, II, III так, чтобы под током была одна секция, то ротор совершит шаговый поворот на небольшой угол до совмещения полюсов магнитов с зубцами 3 ротора. Шаговые двигатели недостаточно мощны для непосредственного вращения ходовых винтов станка, поэтому в схему программного управления включают специальный гидроусилитель моментов, который управляется от шагового двигателя. [55]
Страницы: 1 2 3 4
Шаговые приводы
Шаговые приводы для станков ЧПУ (3 и 4 оси)
Шаговые приводы (1 ось)
Двигатели для станков с ЧПУ должны обеспечивать высокое быстродействие. С целью повышения качества работы станков с ЧПУ производят сокращение длины его кинематических цепей: применяют автономные приводы, по возможности сокращают число механических передач.
Двигатели для станков с ЧПУ разделяются по назначению и принципу работы (это считается основными признаками), по типам двигателей, видам схем управления, месту установки и др. (это относят к дополнительным признакам).
Кроме того, такие двигатели классифицируются по принципу работы: электрические, электромеханические, гидравлические и электрогидравлические.
Однако оптимальным для небольших станков считается использование шаговых двигателей.
Шаговые приводы применяются в станкостроении и других областях промышленности с конца прошлого века. Функционально они предназначены для устройств, в которых необходимо точное позиционирование. Простая конструкция шаговых приводов делает их хорошим выбором для решения разнообразных задач, в том числе для работы на станках с ЧПУ.
Шаговые двигатели для станков с ЧПУ используются чаще всего в комплекте с гидроусилителем момента. Достоинством шагового электропривода является отсутствие обратной связи, что упрощает систему управления в целом.
В практике создания и эксплуатации станков с ЧПУ находят применение также «силовые» шаговые приводы, не требующие промежуточного гидроусилителя.
Преимущества шаговых приводов:
- Отсутствие обратной связи (обычно она используется для управления частотой вращения и в данном случае не нужна), что упрощает конструкцию привода.
- Не происходит накопление ошибки положения ротора двигателя.
- Шаговые приводы совместимы с современными цифровыми устройствами.
Считается, что отсутствие резонанса – это недостаток шаговых приводов. Однако дробление шага на микрошаги позволяет сделать это еще одним преимуществом.
Двигатели для станков с ЧПУ небольшой мощности, как правило, выбираются шаговые именно из-за высокой надежности, прочности, компактности и удобства монтажа.
Нужны шаговые приводы? Позвоните и проконсультируйтесь в компании «Степмотор».
Гидроусилители крутящих моментов типа Э32Г18-2...
Вид типа | Назначение и область применения |
Гидроусилители крутящих моментов Э32Г18-2.. предназначены для перемещения рабочих органов всевозможных станков для резки металла или другого оборудования, снабжённого числовым программным управлением в соответствии с электрическими импульсами, которые подаются на вход гидроусилителя. Перемещение при этом определяется количеством поданных импульсов, а скорость перемещения частотой их следования. Данные гидроусилители имеют 4 типоразмера. Гидроусилители Э32Г18-2.. эксплуатируются на очищенном минеральном масле не грубее 11 класса чистоты, кинематическая вязкость которого составляет от 20 до 200 м2/с, а температура от +100 до +600С при температуре окружающей среды от 00 до +400С. |
Структура условного обозначения Э32Г18-2 Х-Х Х Х ХХХ Х, (Э32Г18-2 - обозначение по классификаторуХ-рабочий объём, в см3 (2-20см3; 3-40см3; 4-80см3; 5-160см3)Х-вид резьбы присоединительных отверстий (без индекса-коническая, индекс 2-метрическая)Х-исполнение конца выходного вала (К-конический, без индекса-цилиндрический)Х-наличие предохранительного устройства (индекс П)ХХХ Х-климатическое исполнение и категория размещения (УХЛ 4) Примером условного обозначения может служить гидроусилитель Э32Г18-22К УХЛ4. В состав гидроусилителя входит из аксиально-поршневой гидромотор, управляющее устройство и шаговый электродвигатель ШД-5Д1М-У3. В состав узла управления входит корпус, который крепится к опорному диску гидромотора. В корпусе размещаются золотник, гильза и резьбовая втулка. Технические характеристики гидроусилителей типа Э32Г18-2..
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Габаритные и присоединительные размеры гидроусилителей типа Э32Г18-2..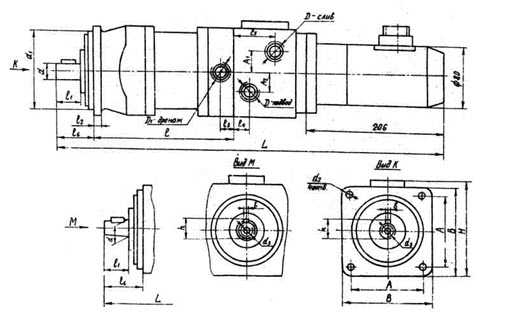 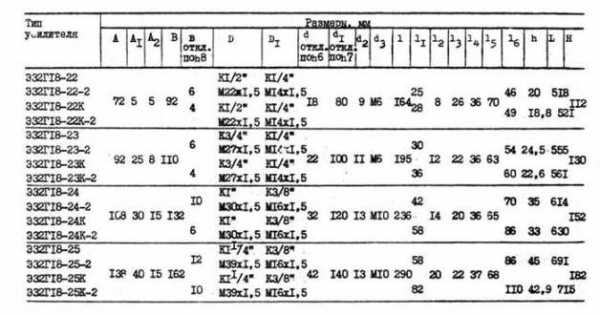 |









"Питер - АТ"
ИНН 780703320484
ОГРНИП 313784720500453
Новости
-
Отзывы о Питер-АТ
Спасибо нашим клиентам за отзывы о нас:
-
Акция на ремонт вариаторных трансмиссий

-
Замена масла в двигателе в подарок
При замене масла в АКПП замена масла в двигателе бесплатно! -
Клиенту на заметку
-
Контрактные АКПП в СПб
