Система динамической стабилизации
Система динамической стабилизации автомобиля (ESP)
|
| Вы можете задать интересующие вас вопросы по теме представленной статьи, оставив свой комментарий внизу страницы. Вам ответит заместитель генерального директора автошколы «Мустанг» по учебной работе Преподаватель высшей школы, кандидат технических наук Кузнецов Юрий Александрович |
Система динамической стабилизации автомобиля (ESP)

Задача ESP - контроль поперечной динамики автомобиля и предотвращение срыва автомобиля в занос и боковое скольжение посредством компьютерного управления моментами силы колес (одновременно одного или нескольких).
Иногда эту систему называют «противозаносной» или «системой поддержания курсовой устойчивости». Она способна компенсировать ошибки водителя, нейтрализуя и исключая занос, когда контроль над автомобилем уже потерян.
Эксперты называют систему ESP самым важным изобретением в сфере автомобильной безопасности после ремней безопасности. Она обеспечивает водителю лучший контроль за поведением автомобиля, следя за тем, чтобы он перемещался в том направлении, куда указывает поворот руля. По данным американского Страхового института дорожной безопасности (IIHS) и Национального управления безопасностью движения на трассах NHTSA (США), примерно одна треть смертельных аварий могла бы быть предотвращена системой ESP, если бы ей были оснащены все автомобили.
Главный контроллер ESP — это пара микропроцессоров, каждый из которых имеет по 56 Кбайт памяти. Система позволяет, например, считывать и обрабатывать значения, выдаваемые датчиками скорости вращения колес, датчиком положения рулевого колеса и датчиком давления в тормозной системе с 20 миллисекундным интервалом.
Но основная информация поступает с двух специальных датчиков: угловой скорости относительно вертикальной оси и поперечного ускорения (иногда это устройство называют G-сенсор). Именно они фиксируют возникновение бокового скольжения на вертикальной оси, определяют его величину и дают дальнейшие распоряжения. В каждый момент ESP знает, с какой скоростью едет автомобиль, на какой угол повёрнут руль, какие обороты у двигателя, есть ли занос и так далее.
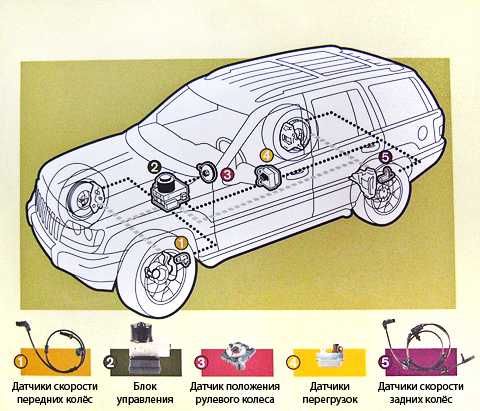
Систему ESP можно рассматривать как расширенный вариант рассмотренной ранее антиблокировочной системы (ABS). Многие узлы ESP объединены с системой ABS, но, вдобавок к её компонентам, ESP требует наличия таких компонентов, как датчик положения руля и акселерометр (прибор, измеряющий разность между абсолютным ускорением объекта и гравитационным ускорением, точнее ускорением свободного падения), следящий за реальным поворотом автомобиля.
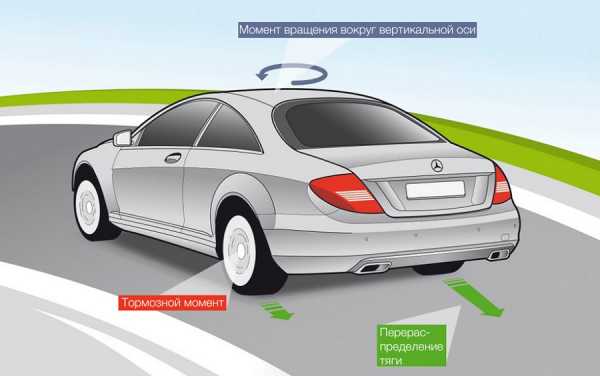
При несоответствии показаний акселерометра показаниям датчика поворота руля, система применяет торможение одного (или нескольких) из колёс машины для того, чтобы предотвратить начинающийся занос. Например, из-за большой скорости при прохождении правого поворота передние колеса сносит с заданной траектории в направлении действия сил инерции, т.е. по радиусу большему, чем радиус поворота. ESP в этом случае притормаживает заднее колесо, идущее по внутреннему радиусу поворота, придавая автомобилю большую поворачиваемость и направляя его в поворот. Одновременно с притормаживанием колес ESP снижает обороты двигателя. Если при прохождении поворота происходит занос задней части автомобиля, ESP активизирует тормоз левого переднего колеса, идущего по наружному радиусу поворота. Таким образом, появляется момент противовращения, исключающий боковой занос. Когда скользят все четыре колеса, ESP самостоятельно решает, тормозные механизмы каких колес должны вступить в работу. Работает система на любых скоростях и в любых режимах движения.

Кроме того, в автомобилях, оборудованных автоматической КПП с электронным управлением, ESP способна даже корректировать работу трансмиссии, то есть переключаться на более низкую передачу или на «зимний» режим, если он предусмотрен.
Существует мнение, что опытному водителю, способному ездить на пределе возможностей, эта система мешает. Такие ситуации действительно редко, но могут возникать — например, когда для выхода из заноса надо поддать газа, а электроника сделать этого не даёт — «душит» движок.
Кроме того, в некоторых случаях может оказаться полезным выключить систему ESP, чтобы колеса могли вращаться с пробуксовкой:
- при движении по глубокому снегу или влажному грунту;
- при раскачке автомобиля вперед-назад при застревании в снегу;
- при движении с установленными цепями противоскольжения.
Во многих автомобилях, оборудованных ESP, предусмотрена возможность её принудительного отключения. А на некоторых моделях система допускает небольшие заносы и скольжения, давая водителю немного похулиганить, вмешиваясь, только если ситуация становится действительно критической.

Система ESP может иметь следующие дополнительные функции:
- система предотвращения опрокидывания;
- система предотвращения столкновения;
- система стабилизации автопоезда;
- система повышения эффективности тормозов при нагреве;
- система удаления влаги с тормозных дисков;
- и др.
Система предотвращения опрокидывания ROP (Roll Over Prevention) стабилизирует движение автомобиля при угрозе опрокидывания. Предотвращение опрокидывания достигается за счет уменьшения поперечного ускорения путем подтормаживания передних колес и снижения крутящего момента двигателя. Дополнительное давление в тормозной системе создается с помощью активного усилителя тормозов.
Система предотвращения столкновения (Braking Guard) может быть реализована в автомобиле, оснащенном адаптивным круиз-контролем. Система предотвращает опасность столкновения с помощью визуальных и звуковых сигналов, а в критической ситуации - путем нагнетания давления в тормозной системе (автоматического включения насоса обратной подачи).
Система стабилизации автопоезда может быть реализована в автомобиле, оборудованным тягово-сцепным устройством. Система предотвращает рыскание прицепа при движении автомобиля, которое достигается за счет торможения колес или снижения крутящего момента.
Система повышения эффективности тормозов при нагреве FBS(Fading Brake Support, другое наименование - Over Boost) предотвращает недостаточное сцепление тормозных колодок с тормозными дисками, возникающее при нагреве, путем дополнительного увеличения давления в тормозном приводе.
Система удаления влаги с тормозных дисков активируется на скорости свыше 50км/ч и включенных стеклоочистителях. Принцип работы системы заключается в кратковременном повышении давления в контуре передних колес, за счет чего тормозные колодки прижимаются к дискам и происходит испарение влаги.
Система динамической стабилизации у разных автопроизводителей называется по разному. ESP – самое распространенное название. Кроме того, используются следующие аббревиатуры:
ASC (Active Stability Control) и ASTC (Active Skid and Traction Control MULTIMODE), используется в автомобилях: Mitsubishi
AdvanceTrac, используется в автомобилях: Lincoln, Mercury.
CST (Controllo Stabilità, используется в автомобилях: Ferrari.
DSC (Dynamic Stability Control), используется в автомобилях: BMW, Ford (только в Австралии), Jaguar, Land Rover, Mazda, MINI.
DSTC (Dynamic Stability and Traction Control, используется в автомобилях: Volvo.
ESC (Electronic Stability Control), используется в автомобилях: Chevrolet, Hyundai, Kia.
ESP (Elektronisches Stabilitätsprogramm), используется в автомобилях: Audi, Bentley, Bugatti, Chery, Chrysler, Citroën, Dodge, Daimler, Fiat, Holden, Hyundai, Jeep, Kia, Lamborghini, Mercedes Benz,Opel, Peugeot, Proton, Renault, Saab, Scania, SEAT, Škoda, Smart, Suzuki, Vauxhall, Volkswagen.
IVD (Interactive Vehicle Dynamics, используется в автомобилях: Ford.
MSP (Maserati Stability Program, используется в автомобилях: Maserati.
PCS (Precision Control System, используется в автомобилях: Oldsmobile (производство которых прекращено в 2004 году).
PSM (Porsche Stability Management, используется в автомобилях: Porsche.
RSC (AdvanceTrac with Roll Stability Control, используется в автомобилях: Ford.
StabiliTrak, используется в автомобилях: Buick, Cadillac, Chevrolet (на Corvette называется Active Handling), GMC Truck, Hummer, Pontiac, Saab, Saturn.
VDC (Vehicle Dynamic Control), используется в автомобилях: Alfa Romeo, Fiat, Infiniti, Nissan, Subaru.
VDIM (Vehicle Dynamics Integrated Management) с VSC (англ. Vehicle Stability Control), используется в автомобилях: Toyota, Lexus.
VSA (Vehicle Stability Assist), используется в автомобилях: Acura, Honda, Hyundai.
Безусловно, ESP высокоэффективная система, но ее возможности не безграничны. Причиной этого являются законы физики, изменить которые электроника не в силах. Поэтому если радиус поворота слишком мал или скорость в повороте превышает разумные границы, даже самая совершенная программа стабилизации движения здесь не поможет.
Категория: Пассивная и активная безопасность | Популярность: 22433 | Оценка: 2.49Добавить комментарийКомментарии:
Устройство и назначение системы динамической стабилизации DSC
Современный автомобиль представляет собой очень сложный комплекс механических и электронных компонентов, которые призваны помочь водителю в решении разного рода задач, в том числе, возникающих в процессе движения. Устройство динамической стабилизации DSC является одним из таких компонентов.
Система динамической стабилизации
Устройство
Определение
DSC-это аббревиатура английских слов Dynamic Stability Control. Есть и другие системы, которые выполняют ту же самую роль, но называются по-другому. Исторически первой появилось устройство ESP (Electronic Stability Programme).
Как это видно из названия, устройство DSC работает тогда, когда машина движется. Его задачей является выравнивание траектории, предотвращение опрокидывания.
Условия работы
Устройство динамической стабилизации работает эффективно в том случае, если соблюдаются следующие условия:
- Учитывается максимально полное количество необходимых входных параметров;
- Точность и своевременность информации;
- Задействованы органы эффективного управления динамикой;
- Быстродействие устройства в целом;
- Оптимальные алгоритмы управления (программа);
- Технические характеристики автомобиля.
Очень важно, чтобы сбои в работе блока управления были исключены. Технические характеристики каждой машины индивидуальны. Даже разные шины будут иметь неодинаковое сцепление с дорогой. А уж тем более высота их профиля и радиус в целом. Значительно снижает эффективность системы стабилизации разная глубина протектора шин, установленных на машине.
Входные параметры
Система стабилизации учитывает переменные движения автомобиля и сравнивает их с действиями водителя. Входными параметрами являются:
- Угол поворота передних колёс;
- Угол поворота руля;
- Поперечное ускорение автомобиля;
- Угловая скорость авто;
- Скорость вращения колёс;
- Величина тормозного воздействия на каждую пару колодок;
- Давление в тормозной системе.
В программе системы динамической стабилизации необходимо учитывать угол поворота руля и скорость вращения всех колёс для того, чтобы вычислить предполагаемую траекторию движения.
Ведь по скорости вращения колёс косвенно, с некоторыми допущениями, можно судить о том, насколько быстро движется автомобиль. Угол передних колёс плюс скорость движения при хороших дорожных условиях должны соответствовать определённому угловому ускорению автомобиля.
Все входные параметры поступают в блок управления в виде электрических сигналов, которые участвуют в расчётах программы в качестве переменных.
Выходные воздействия
Управлять динамической стабилизацией можно несколькими способами:
- Изменением тормозного воздействия;
- Крутящего момента двигателя;
- Распределением крутящего момента между колёсами (полный привод);
- Поворотом передних колёс (в некоторых автомобилях).
Система динамической стабилизации интегрирована с АБС. Это вполне логично, ведь изменения тормозных усилий напрямую связаны с её работой.
С этой целью система стабилизации может открывать впускной и выпускной клапан каждого тормозного привода, тем самым регулируя нужное усилие. Это позволяет притормаживать или приотпускать. Об усилии можно судить по давлению в каждом приводе.
Принцип работы
Система динамической стабилизации функционирует согласно программе управляющего блока. Суть работы состоит в сравнении текущей траектории с предполагаемой, которая напрямую связана с действиями водителя.
В процессе движения автомобиля возникают препятствия, изменяющие его траекторию. Например, может возникнуть занос передних или задних колёс. В этом случае угловое ускорение будет отличаться от требуемого при текущем угле колёс и скорости. Поперечное ускорение тоже возрастёт. Разность между настоящим и необходимым ускорением будет влиять на тормозные усилия колёс.
Если скорость движения автомобиля превышает безопасную и максимально допустимую, тогда система стабилизации подаст сигнал блоку управления двигателем, который уменьшит его крутящий момент.
Система динамической стабилизации действует не только при появлении каких-либо препятствий. Операции управления, выполняемые водителем иногда оказываются недостаточными. В такие моменты нужно притормаживать какое-либо из колёс до тех пор, пока траектория не станет оптимальной.
Вам понравилась статья? Она была полезной?
Похожие статьи:
Система динамической стабилизации
Система динамической стабилизации предназначена для контроля поперечной динамики автомобиля и предотвращение срыва автомобиля в занос и боковое скольжение посредством компьютерного управления моментами силы колес. Иногда эту систему называют «противозаносной» или «системой поддержания курсовой устойчивости». Она способна компенсировать ошибки водителя, нейтрализуя и исключая занос, когда контроль над автомобилем уже потерян.
Функции системы динамической стабилизации
Причиной большого числа ДТП является человеческий фактор. Даже при обычных условиях движения водитель и автомобиль могут достигнуть своих физических пределов вследствие, к примеру, неожиданного поворота дороги, внезапно появившегося препятствия или непредвиденного изменения состояния дорожного покрытия. Увеличение скорости также может привести к потере водителем уверенного контроля над автомобилем, если силы поперечного ускорения, воздействующие на автомобиль, в такой ситуации достигнут уровня, требующего от водителя слишком больших усилий.
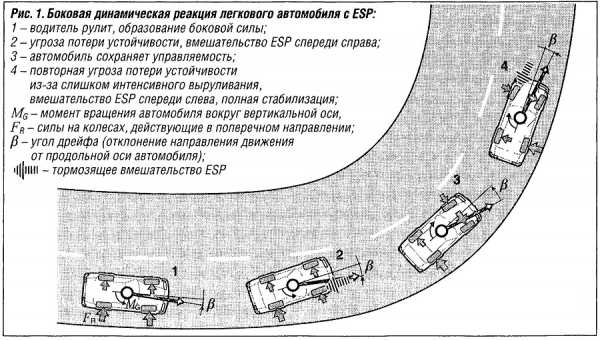
При резком изменении сцепления шин с дорогой автомобиль внезапно начинает вести себя не так, как ожидает водитель, исходя из своего опыта. В таких экстремальных ситуациях водитель зачастую уже не способен самостоятельно стабилизировать автомобиль; как правило, в состоянии паники он своими действиями лишь усугубляет потерю устойчивости. В результате образуется значительное расхождение между продольным движением автомобиля и его продольной осью (угол дрейфа β). Даже путем поворота рулевого колеса в противоположном направлении обычный водитель сможет самостоятельно восстановить устойчивость лишь при угле дрейфа не более 8°.
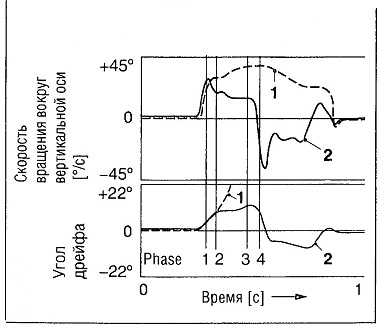
Система динамической стабилизации (ESP) — именно под этим названием компания Bosch вывела на рынок свою систему управления динамикой движения — вносит значительный вклад в преодоление таких ситуаций, помогая водителю сохранить управляемость автомобиля в физических рабочих пределах. Датчики постоянно фиксируют поведение и водителя, и автомобиля. Путем сравнения фактического состояния с заданным, подходящим к той или иной ситуации, в случае значительных расхождений система вмешивается в работу тормозной системы и силового агрегата для стабилизации автомобиля (рис.1 «Боковая динамическая реакция легкового автомобиля с ESP» ).
Встроенная функциональность антиблокировочной системы (ABS) предотвращает блокирование колес при нажатии на тормоз, в то время как аналогично интегрируемая система управления тяговым усилием (TCS) предотвращает пробуксовывание колес при трогании с места и разгоне. ESP — это комплексная система, охватывающая возможности, выходящие далеко за рамки ABS и комбинации ABS и TCS. Эта система предотвращает отклонение автомобиля от курса с заносом задней оси (избыточная поворачиваемость) или передней оси (недостаточная поворачиваемость), автомобиль слушается руля в рамках физически возможного.
Система ESP базируется на испытанных и зарекомендовавших себя компонентах систем ABS и TCS. Таким образом, можно активно тормозить воздействуя на отдельные колеса с высоким уровнем динамической реакции. На крутящий момент двигателя и, соответственно, тягу и пробуксовывание колес можно повлиять с помощью системы управления двигателем. Эти системы сообщаются между собой, к примеру, по шине CAN.
Требования к системе динамической стабилизации
Система динамической стабилизации (ESP) помогает повысить безопасность дорожного движения. Она улучшает поведение автомобиля на дороге в рамках физически возможного. Реакция автомобиля остается предсказуемой для водителя, и автомобиль становится более управляемым в критических ситуациях.
В рамках физических возможностей автомобиля курсовая устойчивость автомобиля улучшается во всех состояниях — при полном и частичном торможении, движении накатом, разгоне, обгоне и изменениях нагрузки, а также, к примеру, в случае экстремальных маневров (при панической реакции). Значительно снижается риск заноса.
В ряде ситуаций эффективность торможения достигается путем использования тяговых характеристик при вмешательстве ABS и TCS, и когда активировано управление тяговым крутящим моментом двигателя (автоматическое увеличение оборотов двигателя для подавления избыточного тормозного момента двигателя). Это приводит к сокращению тормозного пути и увеличению тяги, улучшению устойчивости и повышению уровня чувствительности рулевого управления.
Некорректные вмешательства систем могут сказаться на безопасности. Комплексная концепция безопасности обеспечивает своевременное обнаружение всех неисправностей, которых не удается избежать, и система ESP полностью или частично отключается в зависимости от типа неисправности.
Многочисленные исследования показали, что ESP значительно снижает количество ДТП, вызванных заносом, и уровень смертности в ДТП. Как следствие, оснащение автомобилей системой ESP стало обязательным в США и Канаде с сентября 2011 года. В Евросоюзе (ЕС), все новые легковые автомобили и легкие грузовики должны оснащаться системой ESP с ноября 2011 года (неотъемлемая часть ECE-R 13Н). Для остальных новых автомобилей установлен переходный период до конца 2014 года. В других регионах, например, в Японии и Австралии, также будут вводиться такие требования.
Принцип действия системы динамической стабилизации
Система динамической стабилизации (ESP) использует тормозную систему автомобиля и силовой агрегат для коррекции продольного и поперечного движения автомобиля в критических ситуациях. Когда подключается система динамической стабилизации, она смещает приоритеты управления тормозной системой. Основная функция колесных тормозов-замедление и/или остановка автомобиля — становится вторичной по важности, поскольку происходит вмешательство ESP для сохранения курсовой устойчивости автомобиля. ESP может также ускорять приводные колеса путем вмешательства в работу двигателя, повышая устойчивость.
Оба механизма воздействуют на движение автомобиля. При движении по окружности в устойчивом состоянии существует определенная связь между усилиями на рулевом колесе и результирующим поперечным ускорением автомобиля и, соответственно, силами на шинах в поперечном направлении (эффект подруливания). Силы, воздействующие на шину в продольном и поперечном направлениях, зависят от пробуксовки шины. Это означает, что на движение автомобиля можно повлиять через скольжение шин. Торможение отдельных колес, например, заднего колеса на внутреннем радиусе поворота в случае недостаточной поворачиваемости или переднего колеса на внешнем радиусе поворота в случае избыточной поворачиваемости помогает как можно более точно выдержать заданную траекторию движения автомобиля.
 |  |
Типичный маневр
Чтобы сравнить, как автомобиль будет вести себя в экстремальной ситуации с ESP и без ESP, рассмотрим следующий пример. Маневр движения отражает текущую ситуацию и базируется на программах моделирования, разработанных на основе результатов испытаний. Результаты были подтверждены последующими дорожными испытаниями.
 |  |
Быстрое маневрирование и выруливание
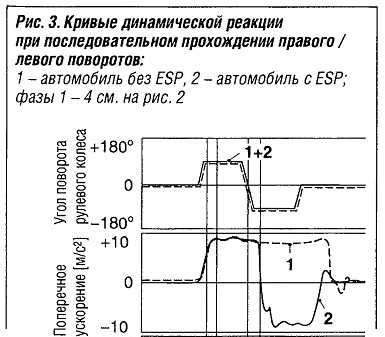
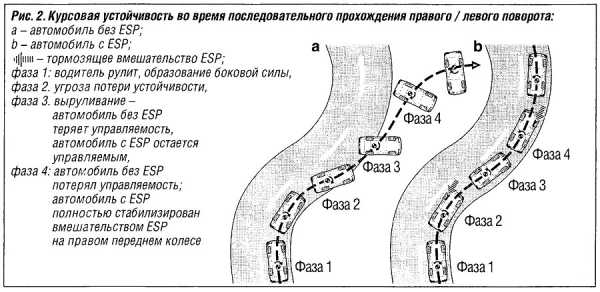
На рис.2 «Курсовая устойчивость во время последовательного прохождения правого/левого поворота» изображена реакция автомобиля без ESP и автомобиля с ESP при прохождении серии S-образных участков с быстрым маневрированием и выруливанием на дороге с высоким коэффициентом сцепления шин с дорогой (μ = 1), без притормаживания и на исходной скорости 144 км/ч. На рис.3 изображены кривые параметров динамической реакции. В начале, при приближении к S-образному участку, условия для обоих автомобилей и их реакции идентичны. Затем водители начинают маневрировать (фаза 1).
Автомобиль без ESP
Как видно из рисунка, после начальной фазы резкое маневрирование у автомобиля без ESP уже угрожает потерей управляемости (рис. 2а, фаза 2). В то время как вращение руля быстро создало значительные поперечные силы на передних колесах, имеет место определенная задержка создания аналогичных сил на задних колесах. Автомобиль реагирует вращением по часовой стрелке вокруг своей вертикальной оси. Он лишь реагирует на попытки водителя вырулить (фаза 3), так как уже потерял управляемость. Резко возрастают скорость рыскания и угол бокового увода, и автомобиль срывается в занос (фаза 4).
Автомобиль с ESP
Автомобиль с ESP стабилизируется после первоначального маневрирования путем активного торможения переднего левого колеса для устранения угрозы потери устойчивости (рис. 2b, фаза 2): это происходит без вмешательства водителя. Это действие ограничивает занос внутрь, уменьшая скорость рыскания и стабилизируя угол разворота при движении по инерции. После изменения направления поворота, свое направление сначала меняет момент, и затем — скорость вращения вокруг вертикальной оси (между фазами 3 и 4). В фазе 4, второе короткое нажатие на тормоз, на этот раз правого переднего колеса — полностью восстанавливает устойчивость. Автомобиль продолжает двигаться по траектории, заданной водителем.
Структура системы динамической стабилизации
Цель системы управления динамикой
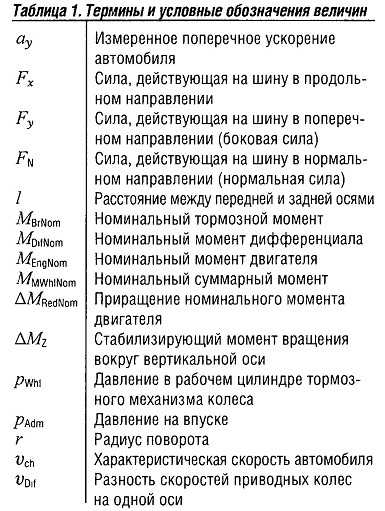
Контроль характеристик управляемости в пределах физически возможного направлен на то, чтобы сохранить три степени свободы автомобиля в плоскости дороги — линейную скорость vx, поперечную скорость vy и скорость ψ вращения вокруг вертикальной оси — в контролируемых пределах. Задуманный водителем маневр преобразуется в динамическую реакцию автомобиля, адаптируемую к характеристикам дороги в рамках процесса оптимизации, нацеленного на обеспечение максимальной безопасности.
Структура системы и управления
Система ESP состоит из автомобиля как управляемой системы, датчиков, определяющих вводные переменные, исполнительных органов для коррекции тормозных, движущих и поперечных сил, а также иерархически структурированных контроллеров — контроллера поперечной динамики (высший уровень) и контроллеров колес (низший уровень) (рис.4 «ESP — общая система управления»). Контроллер высшего уровня определяет заданные значения для контроллеров низшего уровня в виде моментов или скольжения или их изменений. Внутренние системные переменные, не измеряемые напрямую, такие как угол дрейфа β определяются при оценке условий движения.
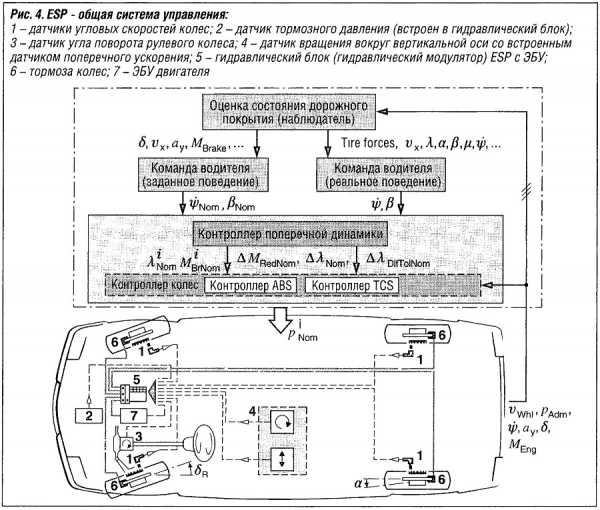
Чтобы определить номинальное поведение, анализируются сигналы, соответствущие командам водителя. Оцениваются сигналы от датчика положения рулевого колеса, датчика давления в тормозной системе (желаемое замедление, получаемое из тормозного давления, измеренного в гидравлическом блоке) и положения педали акселератора (желаемый крутящий момент двигателя). При вычислении номинального поведения также учитывается используемый потенциал коэффициента сцепления шин с дорогой и скорость автомобиля. Эти параметры оцениваются на основе сигналов, получаемых от датчиков частоты вращения колес, датчика поперечного ускорения, датчика скорости вращения вокруг вертикальной оси и датчика давления в тормозной системе. Затем вычисляется момент относительно вертикальной оси, который необходим для приближенного приведения параметров действительного состояния к параметрам требуемого состояния.
В целях получения требуемого момента рыскания необходимо, чтобы изменения в величинах тормозного момента и относительного скольжения колес определялись посредством контроллера ESP. Эти величины затем устанавливаются контроллерами низшего уровня — контроллерами относительного скольжения и тягового усилия с помощью исполнительного механизма гидравлической тормозной системы и привода управления работой двигателя.
Оценка состояния движения
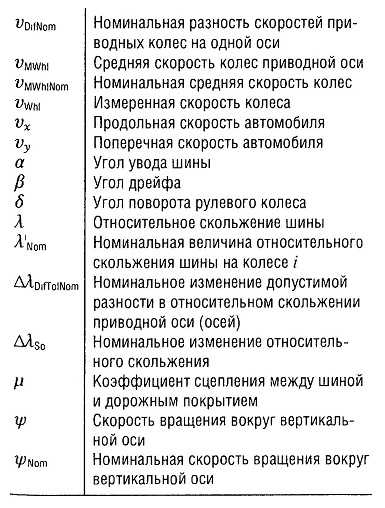
Для определения стабилизирующих вмешательств важно не только знать сигналы от датчиков угловых скоростей колес vwhl, давление на впуске рAdm, скорость вращения вокруг вертикальной оси поперечное ускорение ψ, угол поворота рулевого колеса δ и крутящий момент двигателя, но и ряд других внутренних системных переменных, которые могут быть измерены косвенно. К ним, к примеру, относятся силы, действующие на шины в продольном, поперечном и нормальном направлениях (Fx, Fy и Fn), линейная скорость vx, значения относительного скольжения шин λi, угол бокового увода колес а на одной оси, угол дрейфа β поперечная скорость автомобиля vy и коэффициент сцепления μ. Они определяются по сигналам датчиков на базе вычислительных моделей.
Линейная скорость автомобиля vx имеет ключевую важность для всех контроллеров бокового увода колес и поэтому должна вычисляться с очень большой точностью. Это делается на основе автомобильной модели с использованием измеренных угловых скоростей колес. Здесь необходимо учитывать влияние многочисленных факторов. Скорость автомобиля vx уже в нормальных ситуациях вследствие торможения или пробуксовки отличается от линейных скоростей вращательного движения колес vwhl. У полноприводных автомобилей, в частности, необходимо учитывать особенности привода колес. На поворотах колеса, движущиеся по внутреннему радиусу, проходят по траектории, отличной от траектории колес на внешнем радиусе, следовательно, их скорости разные.
Управляемость автомобиля меняется при обычной эксплуатации в ответ на изменения нагрузки, сопротивления движению (например, уклон дороги или изменение типа покрытия, ветер) или износ (например, тормозных колодок).
При всех этих граничных условиях линейная скорость автомобиля должна оцениваться с отклонением в несколько процентов для обеспечения стабилизирующего вмешательства в необходимой степени.
Контроллер поперечной динамики
Задачей контроллера поперечной динамики является вычисление фактического поведения автомобиля на основании, например, сигнала скорости вращения вокруг вертикальной оси и угла дрейфа, и сделать поведение автомобиля в экстремальной по динамике ситуации как можно более близким к поведению в обычной ситуации (номинальное поведение).
Связь, существующая при движении по окружности в устойчивом состоянии между скоростью вращения вокруг вертикальной оси и углом поворота рулевого колеса δ, линейной скоростью автомобиля vx и характеристическими переменными, используется для определения номинального поведения. Применяя одноколейную модель, получаем:
ψ = (vx / l) δ (1/ 1+(vx/vch)2)
в качестве базы для расчета номинального движения автомобиля. В этой формуле l означает расстояние между передней и задней осями. Геометрические и физические параметры модели автомобиля обобщены в «характеристической скорости автомобиля» vch.
В этом случае переменная ψ ограничивается соответственно текущим коэффициентам скольжения и конкретными свойствами динамики автомобиля и ситуации движения (инициируемые водителем торможение или разгон) и такими условиями, как наличие уклона или различие в коэффициентах скольжения (μ-разделение). Таким образом, команда водителя известна как номинальная скорость вращения вокруг вертикальной оси ψNom.
Контроллер поперечной динамики сравнивает измеренную скорость вращения вокруг вертикальной оси с номинальной и в случае значительных отклонений вычисляет момент вращения вокруг вертикальной оси, необходимый для совпадения переменной величины фактического состояния с номинальным значением. На более высоком уровне контролируется угол дрейфа β и по мере роста значений все в большей степени учитывается в расчете стабилизирующего момента вращения вокруг вертикальной оси ΔMZ. Эта выходная переменная контроллера применяется посредством входных переменных тормозного момента и проскальзывания отдельных колес, корректируемых контроллерами нижнего уровня.
Стабилизирующие вмешательства выполняются на всех колесах, торможение которых генерирует момент вращения вокруг вертикальной оси в требуемом направлении вращения, и на которых еще не достигнут предел передаваемых сил. У автомобиля с избыточной поворачиваемостью физический предел сначала превышается на задней оси. Поэтому стабилизирующие вмешательства выполняются на переднем мосту. У автомобиля с недостаточной поворачиваемостью ситуация обратная.
Номинальные значения относительного скольжения λ’Nom, запрашиваемые контроллером поперечной динамики, на отдельных колесах устанавливаются с помощью контроллеров колес, т.е. контроллеров низшего уровня (см. рис. 4). Различают следующие три случая.
Управление колесами при движении накатом
Чтобы создавать как можно более точные величины момента вращения вокруг вертикальной оси, необходимые для стабилизации автомобиля, силы на колесах должны изменяться при определенных условиях путем контроля проскальзывания колес. Номинальная величина проскальзывания, запрашиваемая контроллером поперечной динамики на том или ином колесе в случае отсутствия торможения регулируется контроллером проскальзывания путем активного нагнетания давления. Для этого нужно как можно более точно знать величину текущего проскальзывания колеса. Оно вычисляется на основе сигнала измеренной скорости колеса и линейной скорости автомобиля vx. Номинальный тормозной момент на колесе образуется из отклонения фактической величины проскальзывания от номинальной с использованием PID — регулирования (пропорционально-интегральнодифференциального регулирования).
Колесо может подвергаться торможению не только в случае активного нагнетания давления контроллером поперечной динамики. После переключения на пониженную передачу и резком отпускании педали газа инерция движущихся деталей двигателя в определенной степени тормозит приводные колеса. При увеличении этой силы и соответствующего реактивного момента сверх определенного уровня шины теряют способность передавать результирующие нагрузки на дорогу и у них появляется тенденция к блокированию (например, из-за внезапного наезда на скользкий участок дороги). Тормозное проскальзывание приводных колес можно ограничить в случае движения накатом посредством регулировки тормозного момента двигателя. Водителем это воспринимается как «плавный разгон».
Управление колесами при торможении
При торможении на отдельных колесах выполняются различные операции, в зависимости от ситуации:
- вмешательство водителя через нажатие педали тормоза и вращение рулевого колеса;
- эффект контроллера ABS, предотвращающего блокировку отдельных колес;
- вмешательства контроллера поперечной динамики, обеспечивающие устойчивость автомобиля за счет подтормаживания отдельных колес, при необходимости.
Эти три требования должны координироваться таким образом, чтобы инициируемые водителем торможение и маневрирование реализовывались как можно полнее. Если управление колесами выполняется главным образом с целью максимального замедления автомобиля, то его можно выполнять на основании ускорения колес, надежно определеяемого по минимальной информации датчиков (управление неустойчивостью). Для регулировки продольных и поперечных сил на шине для стабилизации автомобиля необходимо применять принцип управления проскальзывания, так как он также позволяет управлять колесами в нестабильном диапазоне характеристики коэффициента сцепления / проскальзывания. Однако на основании имеющихся сигналов датчиков должна определяться абсолютная величина проскальзывания колеса до нескольких процентов, в зависимости от скорости автомобиля.
Контроллер ABS
Задача контроллера ABS — обеспечить устойчивость и управляемость автомобиля в любых дорожных условиях и использование сцепления между шинами и дорогой в как можно большей степени. Будучи контроллером нижнего уровня по отношению к контроллеру поперечной динамики, он выполняет эти функции путем модулирования тормозного давления на колесе таким образом, чтобы обеспечивалась максимально возможная продольная сила при сохранении достаточной поперечной устойчивости. Однако в ESP измеряется больше переменных, чем в ABS, имеющей только датчики угловых скоростей колес. Таким образом, информация о движении колеса, такая как скорость вращения вокруг вертикальной оси или поперечное ускорение, получается путем прямого измерения с большей точностью, чем при модельной оценке на основании нескольких измеренных значений.
В определенных ситуациях можно повысить эффективность системы путем адаптации управления ABS посредством использования переменных из контроллера поперечной динамики. Когда автомобиль тормозит на неровной дороге (μ -разделение), на левых и правых колесах возникают очень разные тормозные силы. В результате возникает момент вращения вокруг вертикальной оси, на который водитель должен реагировать выруливанием, чтобы стабилизировать автомобиль. Скорость нарастания этого момента и быстрота последующей реакции водителя зависят от момента инерции автомобиля вокруг вертикальной оси. ABS вызывает задержку увеличения момента вращения вокруг вертикальной оси, сдерживая рост давления в колесном цилиндре переднего колеса с более высоким коэффициентом сцепления с дорожным покрытием. Эта функция ABS может также использовать информацию контроллера высшего уровня — контроллера поперечной динамики (по реакции водителя и поведению автомобиля) и, соответственно, даже еще лучше реагировать на фактическое движение автомобиля.
Если при торможении в повороте автомобиль при определенных условиях начинает поворачиваться, то тенденции к избыточной поворачиваемости можно противодействовать путем электронного распределения тормозных сил через уменьшение давления на отдельных колесах. Если этого недостаточно, то помогает контроллер поперечной динамики путем активного нагнетания давления на переднем колесе, движущемся по внешнему радиусу поворота (уменьшение поперечной силы). При недостаточной же поворачиваемости тормозной момент увеличивается на заднем колесе, движущемся по внутреннему радиусу поворота (при условии, что колесо не контролируется системой ABS) и слегка уменьшается на переднем внешнем колесе.
Если у автомобиля появляется тенденция к избыточной поворачиваемости при смене полосы с полным или частичным торможением, то уменьшается давление на заднем внешнем колесе (увеличение поперечной силы), и увеличивается давление на переднем внешнем колесе (уменьшение поперечной силы). При недостаточной поворачиваемости при торможении в повороте увеличивается тормозной момент в заднем колесе, движущемся по внутреннему радиусу поворота (при условии, что колесо еще не попало в диапазон вмешательства ABS) и слегка уменьшается на переднем внешнем колесе.
Управление колесами при активном движении
Как только приводные колеса начинают проскальзывать при активном движении, активируется контроллер низшего уровня — контроллер тягового усилия (TCS). На измеренную скорость колеса и соответствующее проскальзывания можно повлиять путем изменения баланса крутящего момента на каждом приводном колесе. Контроллер TCS ограничивает крутящий момент на каждом колесе до величины, которая может быть передана на дорогу. Таким образом, команда водителя реализуется после разгона настолько, насколько зто физически возможно, и одновременно обеспечивается фундаментальная курсовая устойчивость, так как слишком сильно уменьшаются боковые силы на колесе.
У автомобиля с активной осью в качестве регулирующих переменных используются средняя скорость колеса приводной оси.
vMWhl = 1/2 (vlWhl + vRWhl)
и разность скоростей vDif = vlWhl — vRWhl между левым vlWhl и правым vRWhl колесами.
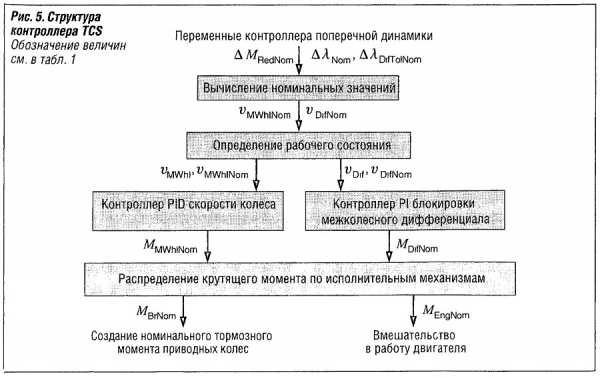
Структура контроллера TCS изображена на рис.5 . Опорные переменные контроллера поперечной динамики включаются в расчет номинального значения средней скорости колеса и разности скоростей колес, а также номинальных значений относительного скольжения и скоростей колес при движении накатом. При расчете номинальных значений vDifNom (номинальной разности скоростей приводных колес на одной оси) и vWhlNom (номинальной средней скорости колес), вводные переменные для изменения номинального относительного скольжения ΔλNom и допустимая разность величин относительного скольжения ΔλDlfTolNom приводной оси или осей корректируют базовые значения, вычисленные блоком TCS. Кроме того, тенденция к недостаточной или избыточной поворачиваемости, выявляемая контроллером поперечной динамики, через приращение номинального крутящего момента двигателя ΔМRedNom напрямую влияет на определение максимально допустимого приводного момента.
Динамическая реакция силового агрегата зависит от сильно изменяющихся режимов работы. Поэтому необходимо определить текущий режим работы (выбранная передача, включение сцепления), чтобы можно было адаптировать параметры контроллера к динамической реакции регулируемой системы и к не линейным характеристикам.
Поскольку на среднюю угловую скорость колеса влияют переменные инерционные силы, возникающие в приводе в целом (в двигателе, трансмиссии, на ведущих колесах, на карданном валу), то для описания её относительно медленной скорости динамической реакции используется относительно большая постоянная времени. Среднюю угловую скорость колеса контролирует нелинейный PID-контроллер, при этом, в частности, приращение l-компонента (в зависимости от режима работы) может варьироваться в широком спектре. В стационарном случае l-компонент является мерой крутящего момента, который может быть передан на колесо в точке контакта с поверхностью дороги. Выходной переменной этого контроллера является номинальный суммарный момент МMWhlNom.
И наоборот, постоянная времени для разности скоростей колес относительно мала и отражает тот факт, что собственные инерционные силы колес являются практически единственным определяющим фактором для динамической реакции. Кроме того, в отличие от средней скорости колес, двигатель влияет на неё лишь косвенно. Разность скоростей колес vDif контролируется нелинейным Pl-контроллером. Поскольку притормаживания приводного колеса вначале становятся заметными только через баланс крутящих моментов этого колеса, то они изменяют распределение межколесного дифференциала, имитируя его блокировку. Параметры этого контроллера блокировки межколесного дифференциала лишь в минимальной степени зависят от включенной передачи и влияний двигателя. Если дифференциальная скорость на приводной оси отличается от номинальной vDlfNom больше, чем это допустимо («мертвая зона»), то запускается вычисление номинального дифференциального момента MDlfNom. «Мертвая зона» расширяется, если тормозных вмешательств TCS необходимо избегать, например, при прохождении поворотов на пределах возможностей.
Номинальные дифференциальные крутящие моменты
Номинальный суммарный и номинальный дифференциальный крутящие моменты являются основой для распределения позиционирующих сил между исполнительными механизмами. Номинальный дифференциальный момент MDlfNom задается разностью между крутящими моментами на левом и правом ведущих колесах путем активации соответствующего клапана в гидравлическом блоке (ассиметричное вмешательство тормозов). Номинальный суммарный момент МMWhlNom регулируется как вмешательствами двигателя, так и симметричным вмешательством тормозов.
У бензинового двигателя регулировки, предпринимаемые через дроссельный клапан, относительно медленно дают эффект (задержка и переходная реакция двигателя). Для быстрого вмешательства через двигатель используются задержка момента зажигания и еще одна опция — селективное подавление импульсов впрыска. В дизельных двигателях электронный блок управления (EDC) уменьшает крутящий момент двигателя путем изменения количества впрыскиваемого топлива. Для краткосрочной помощи в уменьшении крутящего момента двигателя можно применять симметричное тормозное воздействие.
Во внедорожных условиях особую роль играет тяговое усилие. Обычно у внедорожников управление тяговым усилием автоматически адаптируется путем идентификации ситуации для достижения наилучших уровней эффективности и надежности. Другие автопроизводители дают водителю возможность выбрать различные регулировки, от деактивации ограничения крутящего момента двигателя до адаптации к особым состояниям дороги (лед, снег, трава, песок, снежная каша, каменистый грунт).
Дополнительные функции поперечной динамики
Описанные выше базовые функции ESP могут также включать в себя дополнительные функции поперечной динамики для особых категорий автомобилей, таких как полноприводные универсалы или внедорожники (SUV) и легкие фургоны, а также для особых требований к стабилизации автомобилей.
Расширенное управление недостаточной поворачиваемостью
Даже в нормальных условиях движения автомобиль может оказаться неспособным адекватно реагировать на вращение рулевого колеса (с образованием недостаточной поворачиваемости), если, к примеру, на повороте дорожное покрытие внезапно окажется мокрым или грязным. ESP может увеличить скорость вращения автомобиля вокруг вертикальной оси, создав дополнительный момент вращения. Это позволяет автомобилю пройти поворот с физически возможной максимальной скоростью. Ожидаемая частота вмешательств и требования к комфорту у разных типов автомобилей разные и поэтому имеются соответственно разные ступени расширения для выполнения таких тормозных вмешательств, которые влияют на поведение автомобиля при недостаточной поворачиваемости.
Если водитель захочет пройти поворот по меньшему радиусу, чем это физически возможно, то останется лишь уменьшение скорости автомобиля. Эту информацию можно считывать во время поворота в устойчивом состоянии по зависимости между радиусом поворота r, линейной скоростью автомобиля vx и скоростью вращения вокруг вертикальной оси ψ:
r = vx / ψ
Чтобы автомобиль оставался на заданной траектории, он — без применения момента вращения вокруг вертикальной оси — тормозится настолько, насколько это необходимо путем торможения всех колес (расширенное управление недостаточной поворачиваемостью, EUC).
Предотвращение опрокидывания
Легкие грузовики и другие автомобили с высоким центром тяжести, такие как внедорожники (SUV), могут перевернуться при возникновении больших поперечных сил, например, из-за резкого руления при маневрах уклонения от препятствия на сухой дороге (очень динамичные ситуации вождения) или при медленном увеличении поперечного ускорения автомобиля до критического при съезде с автострады с уменьшающимся радиусом поворота на слишком высокой скорости (почти стационарные ситуации вождения).
Существуют особые функции (функции подавления опрокидывания, RMF), выявляющие эти критические ситуации с помощью обычных датчиков ESP и стабилизирующих автомобиль путем вмешательства в работу тормозной системы и двигателя. Для обеспечения своевременного вмешательства, в дополнение к маневрирующим действиям водителя и измеренной реакции автомобиля (скорость вращения вокруг вертикальной оси и боковое ускорение), для оценки поведения автомобиля в ближайшем будущем используется прогнозирующая модель. В частности, при выявлении надвигающейся опасности опрокидывания притормаживаются два колеса на внешнем радиусе поворота. Это действие уменьшает поперечные силы на колесах и, соответственно, критическое поперечное ускорение. Управление колесами должно выполняться с таким высоким уровнем чувствительности, чтобы, несмотря на сильно колеблющиеся вертикальные силы FN, управляемость не ухудшалась из-за тенденции к блокированию отдельных колес, особенно при очень динамичных маневрах уклонения. Уменьшение скоростей колес при притормаживании отдельных колес также помогает водителю удержать автомобиль на своей полосе. В почти стационарных ситуациях движения точно выверенное уменьшение крутящего момента двигателя также не позволяет водителю спровоцировать критическую ситуацию.
Момент стабилизирующего вмешательства и его интенсивность должны быть как можно точнее адаптированы к текущему поведению автомобиля. Это поведение может значительно изменяться с нагрузкой, к примеру, в случае с легкими фургонами и внедорожниками с багажниками на крыше. Такие автомобили используют дополнительные оценочные алгоритмы, вычисляющие массу автомобиля и изменение центра тяжести, вызванное распределением нагрузки, если это требуется для адаптации функций ESP (управление с адаптацией к нагрузке, LAC).
Подавление раскачивания прицепа
В зависимости от скорости движения автомобили с прицепом подвержены раскачиванию вокруг вертикальной оси. Если автомобиль с прицепом или автопоезд движется со скоростью меньшей «критической» (обычно 90 км/ч и 130 км/ч), эти раскачивающие движения адекватно и быстро гасятся. Но если скорость оказывается выше, то небольшие повороты руля, боковой ветер или наезд на выбоину могут внезапно вызвать такие раскачивающие движения, которые быстро набирают интенсивность и в конечном счете могут привести к ДТП из-за складывания автопоезда.
Периодическая избыточная поворачиваемость вызывает стандартные стабилизирующие вмешательства ESP, но они обычно приходят поздно и сами по себе не способны стабилизировать автопоезд. Функция подавления раскачивания прицепа (TSM) своевременно выявляет раскачивающие движения на основе сигналов стандартных датчиков ESP; это делается посредством анализа скорости вращения тягача вокруг вертикальной оси на основе моделей, с учетом маневрирующих движений водителя. Когда эти раскачивающие движения достигают критического уровня, автопоезд автоматически тормозится для уменьшения скорости до такой степени, чтобы даже малейшее последующее возбуждение не вызвало немедленных критических колебаний. Чтобы как можно эффективнее погасить колебания в критической ситуации, в дополнение к симметричному торможению через все оси тягача выполняются притормаживания отдельных колес, быстро устраняющие раскачивание автопоезда. Ограничение крутящего момента двигателя предотвращает опасное ускорение автомобиля (инициируемое водителем) во время стабилизации.
Активация других исполнительных органов ESP
Наряду с использованием гидравлических колесных тормозов, предусмотрены и другие исполнительные механизмы, посредством которых можно влиять на динамику движения автомобиля. Когда активное рулевое управление и системы шасси соединяются с ESP, образуя комплексную систему- систему управления динамикой автомобиля (Vehicle Dynamics Management, VDM), они в комплексе могут даже лучше поддержать водителя, что еще больше повышает безопасность движения и динамику вождения.
В то время как сочетание системы стабилизации рулевого управления с тормозной системой появилось в последние несколько лет, системы для активации блокировки дифференциала в трансмиссии уже давно представлены на рынке. Большое количество таких систем означает, что соединение с ESP возможно во многих случаях. Дополнительный исполнительный механизм может быть активирован либо непосредственно из расширенной функции ESP (принцип взаимодействия), либо через отдельный ЭБУ, обменивающийся информацией с ЭБУ ESP (параллельный принцип).
В полноприводных автомобилях создаваемый двигателем момент распределяется между обеими осями через межосевой дифференциал (рис.6 «Концепция полноприводного автомобиля с ESP»). Когда двигатель сначала приводит в действие одну ось, а другая ось соединена с двигателем через межосевой дифференциал, такая система называется зависимой. Если этот межосевой дифференциал представляет собой разомкнутый дифференциал (без блокировки), то приводной момент ограничивается при увеличении пробуксовки одной оси. В самом неблагоприятном случае при пробуксовке колеса не происходит движения вперед. В сочетании с ESP симметричные вмешательства торможением контроллера TCS на все колеса могут ограничить межосевую разность скоростей колес и тем самым добиться продольного блокирующего эффекта.
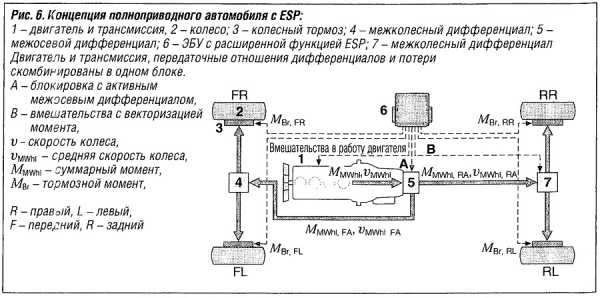
Управление тяговым усилием системы ESP может также сопоставляться с особыми принципами работы других типов межосевых дифференциалов, таких как Torsen и вязкие муфты. В принципе, все управляемые исполнительные механизмы привода должны иметь определенный блокирующий момент и динамическую реакцию при размыкании и смыкании, чтобы адаптировать к себе подруливающие свойства автомобиля.
Если привод автомобиля может быть вручную переключен в различные режимы, то ESP может автоматически подстроиться под выбранный водителем режим. Поскольку ESP базируется на индивидуальном управлении колесами, то взаимодействие с механическими блокировками дифференциала для езды по бездорожью возможно лишь при возможности автоматического размыкания блокировки дифференциала во время вмешательств контроллера поперечной динамики. В противном случае систему необходимо переключить на аварийный режим ABS, когда включена блокировка, потому что вмешательства системы динамической стабилизации на одном колесе затронут и другие колеса, если оси жестко соединены.
Блокираторы межосевого дифференциала
Наряду с простыми соединениями между двумя осями, имеются управляемые блокираторы межосевого дифференциала, в которых электрический или гидравлический исполнительный орган активирует муфту, тем самым адаптируя момент блокировки (рис. 6А). Таким образом, на основании информации ESP (скорости колес, скорость автомобиля, скорость вращения вокруг вертикальной оси, боковое ускорение и крутящий момент двигателя), и с учетом переменных, специфичных для исполнительного органа (таких как механическая нагрузка) можно оптимально адаптировать соотношение двух осей к текущей ситуации движения (динамический крутящий момент при межосевом распределении, DCT-C).
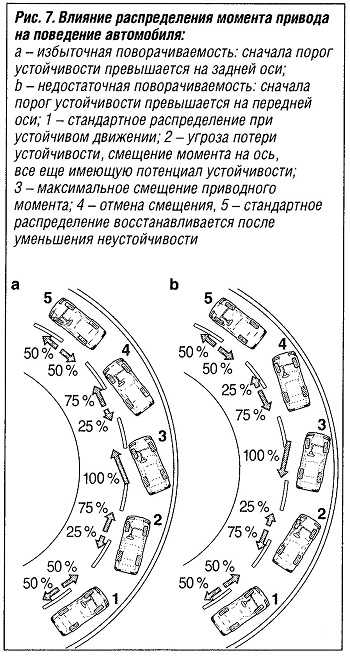 Пример на рис.7 «Влияние распределения момента привода на поведение автомобиля» показывает, как переменное распределение приводного момента влияет на поведение автомобиля. Если в случае риска избыточной поворачиваемости при прохождении поворота можно временно перебросить часть крутящего момента на переднюю ось, это необходимо делать лишь намного позже во избежание потери устойчивости, для уменьшения крутящего момента двигателя или даже стабилизации автомобиля вмешательством тормозной системы (показано максимально возможное перераспределение крутящего момента привода). Если автомобиль имеет тенденцию к недостаточной поворачиваемости, то её можно уменьшить путем смещения крутящего момента на заднюю ось. В обоих случаях достигается улучшение реакции автомобиля и повышение устойчивости. Пределы, в которых фактически возможно смещение крутящего момента привода, зависят от конфигурации конкретного привода.
Пример на рис.7 «Влияние распределения момента привода на поведение автомобиля» показывает, как переменное распределение приводного момента влияет на поведение автомобиля. Если в случае риска избыточной поворачиваемости при прохождении поворота можно временно перебросить часть крутящего момента на переднюю ось, это необходимо делать лишь намного позже во избежание потери устойчивости, для уменьшения крутящего момента двигателя или даже стабилизации автомобиля вмешательством тормозной системы (показано максимально возможное перераспределение крутящего момента привода). Если автомобиль имеет тенденцию к недостаточной поворачиваемости, то её можно уменьшить путем смещения крутящего момента на заднюю ось. В обоих случаях достигается улучшение реакции автомобиля и повышение устойчивости. Пределы, в которых фактически возможно смещение крутящего момента привода, зависят от конфигурации конкретного привода.
Управляемый межколесный дифференциал на одной оси может быть активирован системой ESP по аналогичным линиям к гибкому соединению двух осей. В плане принципа работы система динамического распределения крутящего момента на колеса (Dynamic Wheel Torque Distribution, DWT) отличается лишь от блокировки межколесного дифференциала, выполняемой системой TCS через гидравлические колесные тормоза. Однако такой дополнительный исполнительный орган в обычных ситуациях также активно распределяет момент привода между колесами одной оси. Это делается с минимальными потерями и с гораздо большей чувствительностью и комфортом, чем может быть достигнуто через управление тяговым усилием в сочетании с регулированием тормозного момента и уменьшением крутящего момента двигателя, учитывая износ гидравлического блока ESP.
Компоненты программы
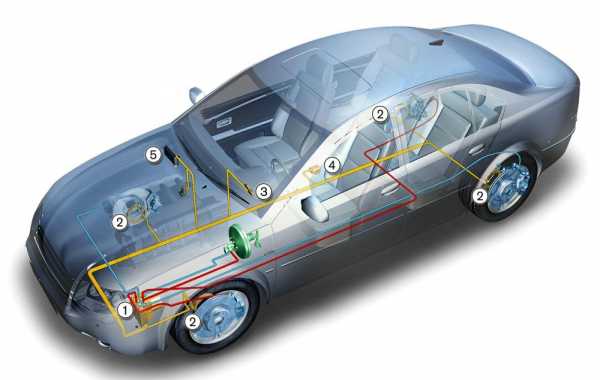
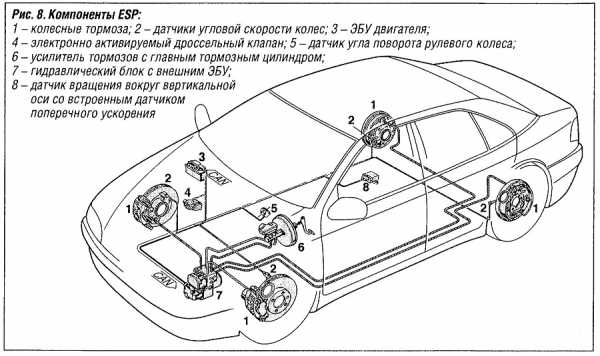
Гидравлический блок, непосредственно подключенный к нему ЭБУ (добавочный ЭБУ) и датчики скорости работают в сложных условиях моторного отсека и колесных арок. Датчик вращения вокруг вертикальной оси и датчик бокового ускорения либо встраиваются в ЭБУ, либо, как датчик угла поворота, устанавливаются в салоне. На рис.8 «Компоненты ESP» показаны примерные места установки компонентов в автомобиле с электрическими и механическими соединениями.
Электронный блок управления
ЭБУ в виде печатной платы включает в себя, как и компьютер с двухъядерным процессором, все приводы и полупроводниковые реле для активации клапанов и насосов, а также интерфейсные контуры для обработки сигналов датчиков и соответствующие коммутирующие входы для дополнительных сигналов (например, выключатель стоп-сигнала). Имеются также интерфейсы (CAN, FlexRay) для сообщения с другими системами, такими как системы управления двигателем и трансмиссией.
Гидравлический блок
Гидравлический блок (также называемый гидравлическим модулятором), как в системах ABS или ABS/TCS, образует гидравлическое соединение между главным тормозным цилиндром и рабочими цилиндрами колесных тормозов. Он преобразует управляющие команды ЭБУ и через электромагнитные клапаны регулирует давление в колесных тормозах. Гидравлический контур выполняется в виде каналов в алюминиевом блоке. Этот блок также используется для размещения необходимых элементов гидравлической функции (электромагнитных клапанов, плунжерных насосов и камер-аккумуляторов).
В системе ESP должно быть 12 клапанов независимо от конфигурации тормозных контуров (рис.9 «Схема гидравлического блока ESP (х-образная конфигурация тормозных контуров»). Кроме того, обычно встраивается датчик давления, измеряющий инициируемое водителем замедление через тормозное давление в главном тормозном цилиндре. Это повышает эффективность стабилизации автомобиля при частично активных маневрах. Давление модулируется при регулировании со стороны ABS (пассивное регулирование) с помощью гидравлики ESP точно так же, как было описано для системы ABS.
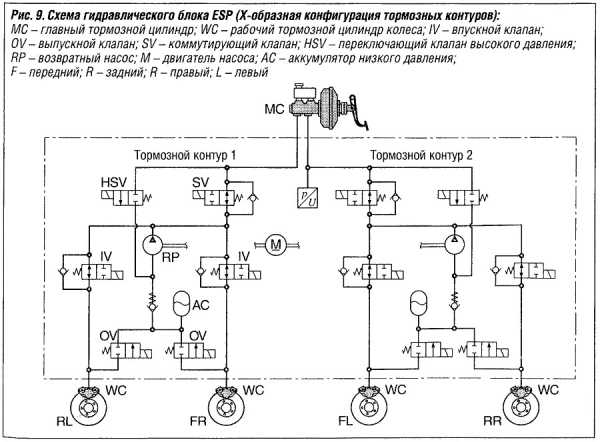
Но поскольку системы ESP также должны активно нагнетать давление (активное регулирование) или повышать тормозное давление, создаваемое водителем (частично активное регулирование), используемый в ABS возвратный насос заменяется самовсасывающим насосом для каждого контура. Рабочие цилиндры тормозных механизмов колес и главный тормозной цилиндр соединяются через коммутационный клапан, открываемый при нулевом электрическом токе, и переключающий клапан высокого давления.
 Дополнительный невозвратный клапан с определенным давлением закрытия предотвращает высасывание лишней тормозной жидкости из цилиндров колес. Насосы приводятся в действие электродвигателем постоянного тока в зависимости от потребностей. Двигатель вращает расположенный на его валу эксцентриковый подшипник.
Дополнительный невозвратный клапан с определенным давлением закрытия предотвращает высасывание лишней тормозной жидкости из цилиндров колес. Насосы приводятся в действие электродвигателем постоянного тока в зависимости от потребностей. Двигатель вращает расположенный на его валу эксцентриковый подшипник.
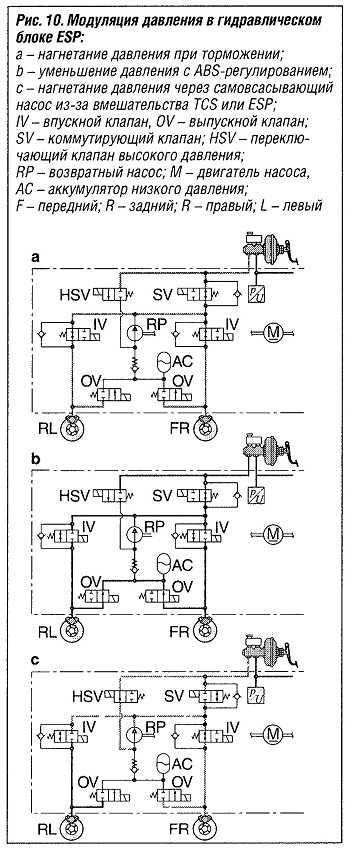
На рис.10 «Модуляция давления в гидравлическом блоке ESP» показаны три примера модуляции давления. Чтобы нагнеталось давление независимо от водителя (рис. 10с), коммутационные клапаны закрываются, а переключающие клапаны высокого давления — открываются. Теперь самовсасывающий насос подает тормозную жидкость на соответствующее колесо или колёса, нагнетая давление. Впускные клапаны других колес остаются закрытыми. Чтобы уменьшить давление, выпускные клапаны открываются, а переключающие клапаны высокого давления возвращаются в исходное положение (рис. 10b). Тормозная жидкость вытекает из рабочих тормозных цилиндров колес в резервуары низкого давления, опорожняемые насосами. Управление двигателем насоса, в зависимости от потребностей, уменьшает шум при нагнетании и регулировании давления.
Для частично активного управления (рис. 10а) переключающий клапан высокого давления должен быть способен открывать всасывающий канал насоса при высоком дифференциальном давлении (> 0,1 МПа). Первая ступень клапана открывается за счет магнитной силы катушки, находящейся под напряжением, а вторая ступень — за счет разности гидравлических площадей. Если контроллер ESP обнаружит нестабильное состояние автомобиля, то коммутирующие клапаны (открытые при нулевом электрическом токе) закрываются, а переключающий клапан высокого давления (закрытый при нулевом электрическом токе) открывается. Затем два насоса генерируют дополнительное давление для стабилизации автомобиля. По завершении вмешательства системы открывается выпускной клапан, и тормозная жидкость из рабочего тормозного цилиндра регулируемого колеса выходит в аккумулятор. Как только водитель отпустит педаль тормоза, тормозная жидкость откачивается из аккумулятора обратно в бачок.
Система контроля
Комплексная система контроля безопасности является фундаментальной для обеспечения надежного функционирования ESP. Система контроля безопасности охватывает работу системы ESP вместе с ее компонентами и всеми другими функциональными взаимосвязями. В основе системы контроля безопасности лежат такие методы, как FMEA, FTA и исследования с моделированием неисправностей. Применяются методы по исключению ошибок, которые бы имели последствия, относящиеся к безопасности. Крупномасштабные программы контроля гарантируют надежное и точное определение всех ошибок датчиков, которые не могут быть полностью исключены. Эти программы основаны на хорошо разработанных надежных программных обеспечениях систем ABS и TCS, контролирующих все компоненты, подключенные к ЭБУ вместе с их электрическими подсоединениями. Со временем надежное программное обеспечение улучшалось более полным использованием возможностей, предоставлявшихся дополнительными датчиками и их последующим приспособлением к специальным компонентам и функциям ESP.
Работа датчиков контролируется в несколько этапов. Во время первой стадии датчики непрерывно контролируются во время управления автомобилем на обрыв проводов и вероятность прохождения сигнала (внедиапазонная проверка, определение помех, физическое правдоподобие). В течение второго этапа наиболее важные датчики проверяются отдельно. Датчик скорости вращения вокруг вертикальной оси испытывается путем преднамеренной расстройки чувствительного элемента и затем оценивается на прохождение сигнала. Даже датчик ускорения имеет внутренний фоновый контроль. При активации сигнал датчика давления должен показывать предопределенную характеристику; происходит внутренняя компенсация смещения и усиления. Датчик угла поворота рулевого колеса имеет свои собственные контрольные функции, которые непосредственно сопровождают какое-либо ошибочное сообщение, поступающее к ЭБУ. Дополнительно контролирует цифровой сигнал, постоянно передаваемый к ECU. Во время третьего этапа применяется аналитическая избыточность для контроля работы датчиков во время стационарного режима эксплуатации автомобиля. В данном случае используется модель автомобиля с целью проверить тот факт, что не имеется нарушений для определенных связей между сигналами датчиков и движением автомобиля. Эти модели также часто применяются для вычислений и компенсирования смещений датчиков, поскольку они остаются в пределах технических условий.
В случае возникновения ошибки система выключается или частично, или полностью, что зависит от типа ошибки. Реагирование системы на ошибки также зависит от того, действительно ли осуществлялось управление.
В следующей статье я расскажу о кузове автомобиля.
Система динамической стабилизации для грузовых автомобилей

Тяжелые грузовики существенно отличаются от легковых автомобилей намного большей массой в сочетании с более высоким центром тяжести и дополнительными степенями свободы, обусловленными движением с прицепом [7]. Поэтому они могут подвергаться неустойчивым состояниям, выходящим далеко за рамки заноса, случающегося с легковыми автомобилями. К таким состояниям относятся складывание автопоездов, вызываемое, к примеру, заносом прицепа и опрокидывание, вызываемое большим поперечным ускорением. Поэтому система динамической стабилизации для грузовых автомобилей должна наряду с обеспечением стабилизации, как у легковых автомобилей, также предотвращать складывание автопоезда и опрокидывание.
Требования к системе динамической стабилизации для грузовых автомобилей
В дополнение к требованиям, предъявляемым к легковым автомобилям, система динамической стабилизации у грузовиков, на основании расширенных функций, должна:
- улучшать курсовую устойчивость и реакцию автопоезда или сочлененного автобуса в пределах физически возможного во всех режимах и при любой загрузке; сюда относится предотвращение складывания автопоездов;
- снижать риск опрокидывания автомобиля или автопоезда как в квазистационарном режиме, так и при маневрах.
Эти требования, реализованные в ESP грузовых автомобилей, приводят, как в случае с легковыми автомобилями, к значительному повышению безопасности движения. По этой причине европейское законодательство, начиная с 2011 года, требует постепенного ввода системы динамической стабилизации для тяжелых грузовиков (более 7,5 т) (неотъемлемая часть ECE-R 13).
Применение системы динамической стабилизации для грузовых автомобилей
Между тем, ESP у грузовых автомобилей теперь предлагается практически для всех конфигураций автомобилей (кроме полноприводных):
- автомобили с колесными формулами 4×2, 6×2, 6×4 и 8×4;
- тягачи с полуприцепами (сочлененные автомобили или просто полуприцепы);
- тягачи с прицепами (автопоезда);
- тягачи с несколькими прицепами (Eurokombi), т.е. тягач, низкорамный прицеп и полуприцеп или полуприцеп с дополнительным прицепом с одной осью или сближенными двумя осями, установленными по центру тяжести.
Принцип действия системы динамической стабилизации для грузовых автомобилей
Системы динамической стабилизации для грузовиков в соответствии с требованиями можно поделить на две описанные ниже функциональные группы.
Стабилизация автомобиля в случае угрозы заноса или складывания автопоезда
Динамическая стабилизация грузового автомобиля вначале выполняется согласно тем же принципам, которые действуют для легковых автомобилей. Контроллер сравнивает текущее движение автомобиля с движением, заданным водителем, с учетом физических возможностей. Однако физическая модель движения в горизонтальной плоскости — для отдельного автомобиля характеризуется тремя степенями свободы (продольная, поперечная и вокруг вертикальной оси) — у сочлененного автомобиля также включает в себя угол сочленения между тягачом и прицепом (дополнительная степень свободы). Существуют и другие степени свободы для комбинаций с малогабаритными прицепами.
Для расчета движения автомобиля, задаваемого водителем, ЭБУ использует упрощенные физико-математические модели (одноколейную модель автомобиля, [8]) для определения номинальной скорости вращения тягача вокруг вертикальной оси. Встречающиеся в этих моделях параметры (характеристическая скорость автомобиля vch, колесная база l и передаточное отношение рулевого механизма il) адаптируются к поведению автомобиля во время эксплуатации с помощью особых адаптационных алгоритмов (например, фильтры Кальмана или рекурсивная оценка по методу наименьших квадратов, [9]). Адаптация параметров в реальном времени особенно важна для грузовиков из-за гораздо большего разнообразия вариантов и нагрузок, чем у легковых автомобилей. Параллельно с этим ESP вычисляет текущее движение автомобиля на основе измеренных значений скорости вращения вокруг вертикальной оси, бокового ускорения и скоростей колес. Значительное различие между движением автомобиля и движением, которое ожидает водитель, ведет к сбою управления, преобразуемому контроллером в корректирующий номинальный момент вращения вокруг вертикальной оси.
Номинальный момент вращения вокруг вертикальной оси
Уровень номинального момента вращения вокруг вертикальной оси у грузового автомобиля зависит от сбоя управления, текущей конфигурации автомобиля (колесная база, количество осей, эксплуатация с прицепом или без и т.д.) и состояния загрузки (масса, центр тяжести в линейном направлении и т.д.). Все эти параметры переменные, они непрерывно определяются системой ESP. Это достигается, к примеру, в загруженном состоянии с помощью оценочного алгоритма на основе сигналов системы управления двигателем (обороты и момент двигателя) и линейного движения автомобиля (скорости колес) для непрерывного определения текущей массы автомобиля.
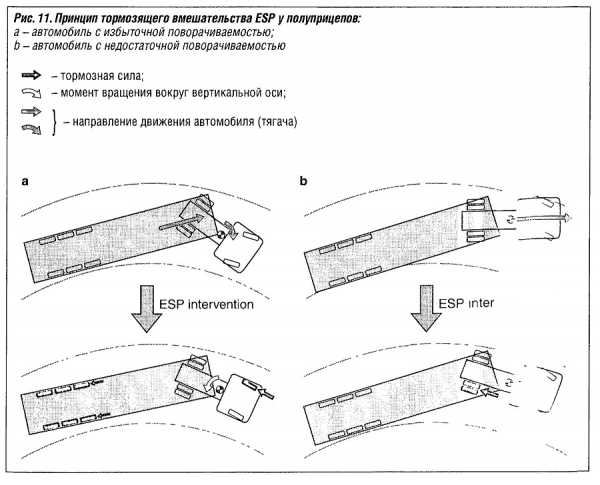
На основании текущей ситуации движения номинальный момент вращения вокруг вертикальной оси соответствующим образом корректируется путем притормаживания отдельных колес прицепа. Это продемонстрировано на примере на рис. 11а и 11b » Принцип тормозящего вмешательства ESP у полуприцепов» для ярко выраженной избыточной и недостаточной поворачиваемости, соответственно.
Наряду с этими ярко выраженными ситуациями существуют и другие критические динамические ситуации, в которых колеса притормаживаются в зависимости от желаемого стабилизирующего эффекта. В случае с более серьезной недостаточной поворачиваемостью весь автомобиль тормозит по каналам, аналогичным тем, что используются в расширенной системе управления недостаточной поворачиваемостью (EUC) у легковых автомобилей.
Из-за высокого центра тяжести заносы и складывания у грузовых автомобилей возникают главным образом при низких и средних коэффициентах сцепления шин с дорогой, когда уже на ранней стадии превышается предел статического трения шин. При высоких коэффициентах сцепления загруженные грузовики из-за высокого центра тяжести обычно начинают опрокидываться до достижения предельного статического трения шин.
Уменьшение риска опрокидывания
Порог опрокидывания (пороговое поперечное ускорение) автомобиля зависит не только от высоты центра тяжести, но и от систем шасси (подвеска, стабилизаторы, пружины и т.д.) и типа полезной нагрузки (фиксированная или движущаяся) [10].
Причиной, вызывающей опрокидывание грузовика, помимо относительно низкого порога опрокидывания, является слишком высокая скорость при прохождении поворотов. ESP использует этот сценарий для уменьшения вероятности опрокидывания автомобиля. Как только автомобиль подходит к порогу опрокидывания, он тормозит посредством снижения крутящего момента двигателя и, при необходимости, задействования тормозов. Порог опрокидывания определяется здесь в зависимости от загрузки автомобиля и распределения нагрузки, при этом загруженное состояние автомобиля оценивается в реальном времени.
Определяемый порог опрокидывания корректируется в зависимости от ситуации движения. Таким образом, порог опрокидывания при высокой скорости, в очень динамичных ситуациях (например, при объезде препятствий) уменьшается, чтобы обеспечить раннее вмешательство системы. И наоборот, при очень медленных маневрах (например, прохождении крутых поворотов на горном серпантине), он повышается, чтобы предотвратить ненужное и деструктивное вмешательство ESP.
Определение порога опрокидывания основано на различных предположениях в отношении высоты центра тяжести и динамической реакции автопоезда с известным распределением нагрузки между осями. Это относится к большей части обычных автопоездов.
Для обеспечения динамической стабилизации даже в случае сильных отклонений от приемлемой ситуации (например, очень высокое расположение центра тяжести) ESP дополнительно обнаруживает возможный отрыв колес от поверхности дорогой на внутреннем радиусе поворота. Это достигается путем контроля колес на предмет неправдоподобной скорости вращения. При необходимости весь автопоезд интенсивно тормозится за счет вмешательства тормозной системы.
Отрыв колес прицепа на внутреннем радиусе поворота сигнализируется электронной тормозной системой прицепа (ELB) по шине CAN (SAE J 11992) путем активации контроллера ABS. У автопоездов с прицепами, оборудованными только системой ABS, выявление отрыва колес на внутреннем радиусе поворота осуществляется только у тягача.
Конструкция системы динамической стабилизации грузовых автомобилей
На европейском рынке электронная тормозная система ELB стала стандартом в области управления тормозами у крупнотоннажных грузовиков. ESP базируется на этой системе, добавляя в неё регулирование динамики движения. Для этого ESP использует возможности ELB по созданию изменяемых тормозных сил на каждом колесе независимо от действий водителя.
Очень разные общие условия для тормозных систем грузовиков в Северной Америке означают, что стандартно используются только системы ABS или ABS/TCS. Поэтому для этих и аналогичных регионов используется система ABS/TCS на базе ESP. В этом случае ESP использует метод, уже применяемый системой TCS на приводной оси для создания тормозных сил отдельно на каждом колесе независимо от водителя с помощью клапана TCS и следующих за ними клапанов ABS. Кроме того, для ESP на базе ABS инициируемое водителем торможение должно измеряться датчиками давления, что при вмешательстве ESP было бы невозможно из-за работы клапана TCS.
Системы датчиков системы динамической стабилизации
Как и в легковых автомобилях в качестве датчиков ESP в грузовиках используется комбинированный датчик скорости вращения вокруг вертикальной оси и поперечного ускорения и датчик угла поворота рулевого колеса. Каждый из этих датчиков соединяют контроллер с интерфейсом CAN для анализа и безопасной передачи измеренных данных.
Датчик угла поворота рулевого колоса обычно монтируется непосредственно под рулевым колесом. Сигнал датчика преобразуется в ЭБУ в угол поворота рулевого колеса.
Чтобы измерять поперечное смещение как можно ближе к центру тяжести тягача, комбинированный датчик скорости вращения вокруг вертикальной оси и поперечного ускорения обычно монтируется рядом с центром тяжести.
Хотя в грузовых автомобилях в основном используются те же датчики, что и в легковых, датчик скорости вращения вокруг вертикальной оси и поперечного ускорения должен иметь гораздо более прочную конструкцию, особенно рамы грузовика, чтобы выдерживать более жесткие условия эксплуатации.
Электронный блок управления
Алгоритмы ESP выполняются вместе с другими алгоритмами для управления тормозами (например, ABS и TCS) в блоке управления тормозами. Этот блок управления конструируется с помощью традиционной технологии печатных плат с мощными микроконтроллерами.
Шина CAN соединяет датчики ESP с блоком управления. Затем номинальные значения давления и скольжения колес по командам ESP реализуются соответствующей тормозной системой для каждого колеса и прицепа. В дополнение к этому тормозная система передает запрошенный крутящий момент двигателя по автомобильной шине CAN (обычно стандарта SAE J 1939) на ЭБУ двигателя для последующей его установки.
Кроме того, в тормозную систему передается необходимая информация от двигателя и тормоза-замедлителя по автомобильной шине CAN. Это в основном текущий и запрашиваемый крутящий момент и обороты двигателя, крутящий момент тормоза- замедлителя, скорость автомобиля и информация от различных выключателей и от имеющихся прицепов.
Функции обеспечения безопасности и контроля
Широкие возможности вмешательства ESP в характеристики управления автомобилем или автопоездом требуют наличия комплексной системы безопасности для обеспечения нормального функционирования системы. Это относится не только к базовой системе ELB или ABS/TCS, но и к дополнительным компонентам ESP, включая все датчики, ЭБУ и интерфейсы.
Используемые в ESP функции контроля в основном базируются на функциях, используемых в легковых автомобилях и адаптируются к характеристикам грузовиков.
Выполняется также взаимный контроль микроконтроллеров, распределенных по всей системе. Это означает, что в блоке управления тормозами имеется главный компьютер. Контролирующий компьютер, в основном выполняющий проверки правдоподобности и мелкие функциональные задачи. Кроме того, соответствующие алгоритмы постоянно проверяют память и прочие внутренние устройства компьютера для определения дефектов, которые могут возникнуть на ранней стадии.
Возникновение неисправностей
Возникновение неисправностей, в зависимости от их характера и значимости, приводит к различным последствиям — от выключения отдельных функциональных групп до полного перехода в резервный режим, когда управление тормозами осуществляется чисто пневматически. Это предотвращает неправдоподобные и потенциально опасные состояния при торможении из-за некорректных сигналов датчиков.
Возникновение неисправности сигнализируется водителю подходящими средствами (например, сигнализатором или сообщением на дисплее), чтобы можно было предпринять соответствующие меры.
Кроме того, любые возникающие неисправности получают в блоке управления отметку времени и хранятся в ЗУ неисправностей. Специалисты СТО могут проанализировать их с помощью подходящей диагностической системы.
В следующей статье я расскажу о безопасности автомобильных кузовов.
Список литературы:
[1] Liebemann, Е.К.; Meder, К.; Schuh, J.; Nenninger, G.: Safety and Performance Enhancement: The Bosch Electronic Stability Control. SAE Paper Number 2004-21-0060.
[2] National Highway Traffic Safety Administration (NHTSA) FMVSS126: Federal Motor Vehicle Safety Standards; Electronic Stability Control Systems; Controls and Display. Vol. 72, No. 66, April 6, 2007.
[3] Mitschke, M.; Wallentowitz, H.: Dynamik der Kraftfahrzeuge. 4th Edition, Springer-Verlag, 2004.
[4] Van Zanten, A.; Erhardt, R.; Pfaff, G.: FDR — Die Fahrdynamikregelung von Bosch. ATZ Auto- mobiltechnische Zeitschrift 96 (1994), Volume 11.
[5] Trachtler, A.: Integrierte Fahrdynamikregelung mit ESP, aktiver Lenkung und aktivem Fahr- werk. at-Automatisierungstechnik 53 (2005) 1.
[6] Reif, K.: Automobilelektronik, 3rd Edition, Vieweg+Teubner, 2009.
[7] Hoepke, E.; Breuer, S. (Editors): Nutzfahr- zeugtechnik — Grundlagen, Systeme, Kompo- nenten. 4th Edition; Vieweg Verlag, 2006.
[8] Winkler, С. : Simplified Analysis of the Steady State Turning of Complex Vehicles. International Journal of Vehicle Mechanics and Mobility, 1996.
[9] Sayed, Ali H.: Adaptive Filters. John Wiley & Sons, 2008.
[10] Odenthal, D.: Ein robustes Fahrdynamik- Regelungskonzept fur die Kippvermeidung von Kraftfahrzeugen. Dissertation TU Munchen, 2002.









"Питер - АТ"
ИНН 780703320484
ОГРНИП 313784720500453
Новости
-
Отзывы о Питер-АТ
Спасибо нашим клиентам за отзывы о нас:
-
Акция на ремонт вариаторных трансмиссий

-
Замена масла в двигателе в подарок
При замене масла в АКПП замена масла в двигателе бесплатно! -
Клиенту на заметку
-
Контрактные АКПП в СПб
